Изобретение относится к машиностроению и может использоваться в качестве ограничителя хода в устройствах с переменной инерцией исполнительных органов.
Целью изобретения является повышение удобства эксплуатации путем автоматизации процесса настройки устройства.
На чертеже изображено предлагаемое устройство.
Устройство для корректирования погрешностей позиционирования исполнительного органа содержит подвижный датчик 1 положения исполнительного органа 2, сопряженный с механизмом настроечного пере- мешения датчика 1, и фиксатор 3 механизма настроечного перемещения датчика 1.
Механизм настроечного перемещения датчика 1 выполнен в виде щупа 4, кинематически связанного с датчиком 1 с аомощью узла 5 с возможностью взаимного противоположно направленного и равного по величине перемещения датчика 1 и щупа 4, причем щуп 4 установлен на линии перемеще- ни я исполнительного органа 2.
В качестве узла 5 может быть применена передача с бесконечной гибкой связью, зубчато-реечная передача и др. Фиксатор 3 выполнен в виде резьбового зажима.
Устройство работает следующим образом.
В исходном положении устройства (фиг. 1) датчик 1 и щуп 4 сведены до упора друг в друга. Исполнительный орган 2 находится в отведенном состоянии и не контактирует с ними. Узел 5 расфиксирован, т. е. зажим 3 ослаблен.
При перемещении исполнительного органа 2 вправо он входит в контакт со щупом 4 и перемещает последний вправо. При этом датчик 1 при помощи узла 5 перемещается влево навстречу исполнительному органу 2 на величину, равную величине перемещения щупа 4.
В процессе этого перемещения датчик 1 входит в контакт с исполнительным органом 2, что вызывает срабатывание датчика 1 и формирование сигнала на оста0
5
нов исполнительного органа 2. Формирование сигнала свидетельствует о достижении исполнительным органом 2 заданной точки.
В силу суммарных факторов, вызывающих инерционность системы управления (по грешность позиционирования), исполнительный орган 2 продолжает движение до полной остановки, перемещая при этом щуп 4 и датчик 1 также на величину погрешности позиционирования.
На этом автоматическая настройка устройства на конкретную величину погрешности позиционирования исполнительного органа 2 заканчивается и механизм настроечного перемещения датчика 1 фиксируется резьбовым зажимом 3.
В дальнейшем в рабочем режиме исполнительный орган 2, перемещаясь слева направо, не доходя до заданной точки на величину, оавную величине погрешности позиционирования исполнительного органа 2, 0 входит в контакт с датчиком 1, который при этом формирует сигнал его останова.
По инерции исполнительный орган 2 продолжает перемещение на ранее установленную величину погрешности позициоииро- вания и останавливается в заданной точке.
Формула изобретения
Устройство для корректирования погрешностей позиционирования исполнитель,, ного органа, содержащее подвижный датчик положения исполнительного органа, сопряженный с механизмом настроечного перемещения датчика, и фиксатор механизма настроечного перемещения датчика, отличающееся тем, что, с целью повышения удобства эксплуатации, механизм настроечного перемещения датчика выполнен в виде щупа, кинематически связанного с датчиком с помощью узла с обеспечением взаимного противоположно направленного и равного по величине перемещения датчика и щупа, при0 чем щуп установлен на линии перемещения исполнительного органа.
5
J-ВНИИПИ Заказ 1713/51 Тираж 836 Подписное Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4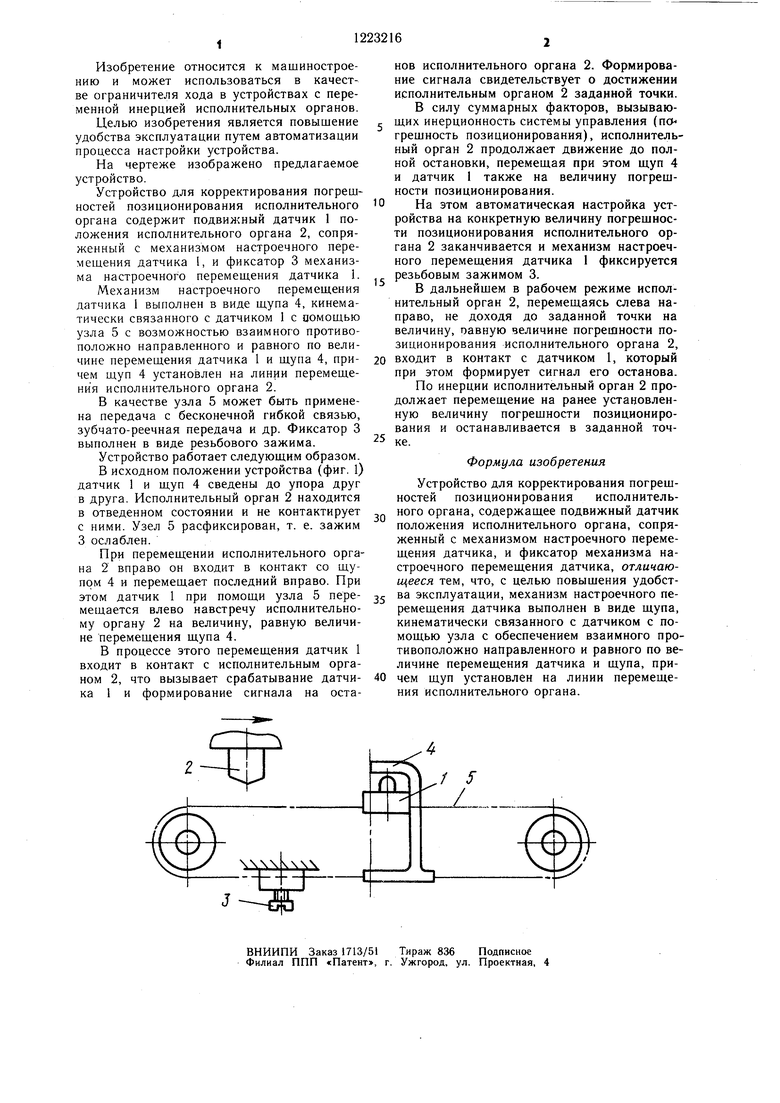
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Привод для координатных перемещений рабочих органов станка | 1985 |
|
SU1283736A1 |
| Модуль промышленного робота | 1986 |
|
SU1393621A1 |
| Станок для резки материалов | 1986 |
|
SU1425056A1 |
| Копировальное устройство для обработки фасонных поверхностей вращения | 1977 |
|
SU703250A1 |
| Устройство для подачи полосового и ленточного материала в зону обработки | 1985 |
|
SU1378992A1 |
| Устройство для пропитки волокнистого шнурового материала | 1983 |
|
SU1183380A1 |
| Устройство для закрепления эластичного трубопровода | 1982 |
|
SU1164493A1 |
| Устройство для измерения величины растяжения изделия при правке | 1983 |
|
SU1148665A1 |
| Фрикционный вариатор | 1985 |
|
SU1310557A1 |
Изобретение относится к устройствам ограничения хода в системах с переменной инерцией исполнительного органа. Целью изобретения является повышение удобства эксплуатации. Устройство для корректирования погрешностей позиционирования исполнительного органа содержит подвижный датчик, механизм настроечного перемеше- ния датчика (МНПД) и фиксатор. Повышение удобства эксплуатации достигается выполнением МНПД в виде ш,упа, связанного с датчиком с помощью узла с обеспечением взаимного противоположно направленного и равного по величине перемещения датчика и шупа. 1 ил. 1C IsD СО ю
| Гаврилов А | |||
| Н | |||
| и др | |||
| Автоматизация производственных процессов в приборо- и агрегатостроении | |||
| М.: Высшая школа, 1968, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКТИРОВАНИЯ НЕЛИНЕЙНОСТЕЙ В СИСТЕМЕ ПРОГРАММНОЙ НАСТРОЙКИ ДЕРЕВООБРАБАТЫВАЮЩИХ СТАНКОВ | 1965 |
|
SU216226A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
