I
126
Изобретение относится к магштностроению, в частности к манипуляторам для автоматизации технологических процессов.
Целью изобретения является повышение надежности работы манипулятора за счет сокращения количества приводов.
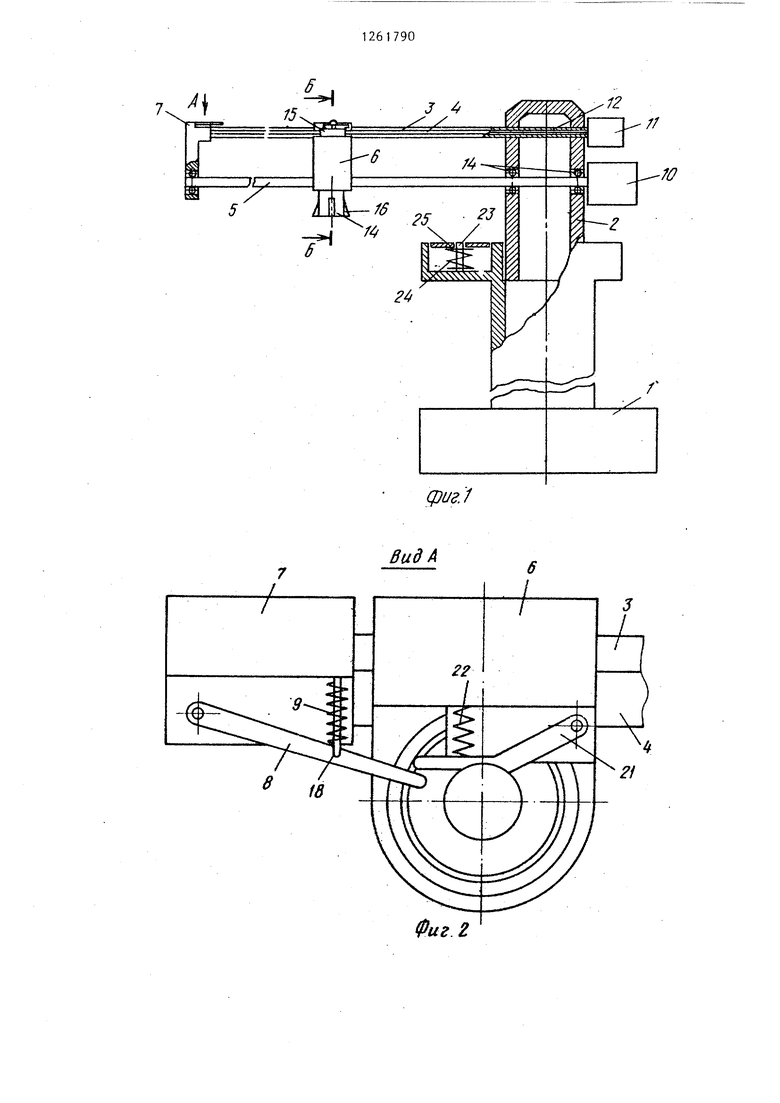
На фиг, 1 показан манипулятор, общий вид; на фиг, 2 - вид А на фиг, 1; на фиг, 3 - разрез Б-Б на фиг, 1,
Манипулятор состоит из -основания
I,на стойке которого смонтирован подъемно-поворотный блок 2, на котором консольно установлены направляющие 3 с рейкой 4 и ходовой винт 5, на деталях 3 и 5 смонтирован захват 6, Направляющая 3 и винт 5 со стороны, противоположньй блоку, соединены планкой 7, на которой шарнирно установлен рычаг 8, подпружиненный относительно планки упругим элементом 9, На блоке 2 закреплены привод 10 ходового винта 5 и электромагнит
II,сердечник которого тягой 12 соединен с рьиагом 8, Приводы блока 2 размейтены в стойке основания 1 ,,
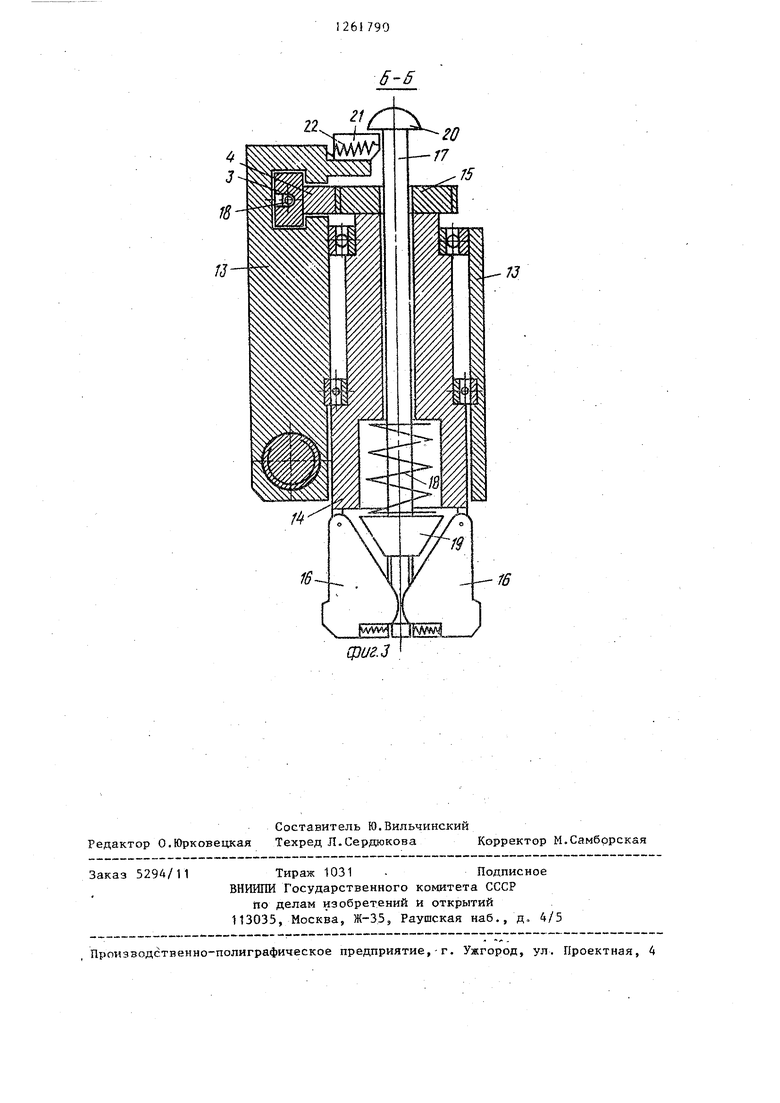
., Захват 6 состоит из корпуса 13, в котором установлена поворотная втулка 14, на одном конце которой закреплено зубчатое колесо 15, взаимодействующее с рейкой 4, а на другом гаарнирно смонтированы губки 16, подпружиненные друг относительно друга, В отверстии втулки 14 размещен стержень 17, подпружиненный упругим элементом 18 относительно втуки 14, На одном конце стержня имеется конус 19, взаимодействующий с губками 16, а на другом - головка 20, На корпусе 13 шарнирно установ1
лен дополнитела.ньш рьг-iar 21, подпру-жиненный относительно .корпуса упругим элементом 22, На стойке основания 1 на кронштейне закреплен упор 23, на который одеты пружина 24 и шайба 25,
В исходном положении рычаг 21 взаимодействуют с головкой 20 стержня 17, при этом губки 16.стянуты.
Манипулятор работает следующим образом.
Включается привод 10, и от ходового винта 5 захват 6 перемещается
в направлении планки 7. Далее блок 2 опускается, и губки захвата вводятся в -захватываемую деталь (не показана) , Включается электромагнит 11, и поворачивается рычаг 8, который
отжимает рычаг 21, При этом стержень 17 перемещается вдоль оси втулки под действием упругого элемента 18 и конусом 19 разжимает губки 16, захватывающие деталь. Далее производится подъем блока 2 и, соответственно, захвата 6 с деталью и перемещение ее в направлении блока. При этом зубчатое колесо 15 взаимодействует с рейкой 4 и вращает втулку 14 с деталью. При достижении крайнего положения производится опускание захвата с деталью на позицию разгрузки. При этом стержень 17 взаимодействует с упором 23, перемещается
вдоль оси втулки 14, и рычаг 21 под действием элемента 22 стопорит стер жень 1/, Губки 16 захвата снимаются и освобождают деталь, которая остается на шайбе 25, Далее производится
подъем захвата, и может осуществляться его перемещение за следующей деталью .
дзигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Устройство для присоединения выводов полупроводниковых приборов | 1975 |
|
SU564666A1 |
| Установка Кривовязюка для вырубки заготовок из плоского материала | 1981 |
|
SU958083A1 |
| Захватное устройство | 1988 |
|
SU1625683A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| АВТОМАТ ДЛЯ СБОРКИ ВЕНТИЛЕЙ ТРУБОПРОВОДОВ | 1972 |
|
SU338346A1 |
МАНИПУЛЯТОР, содержащий основание, смонтированный на нем подъемнр-поворотный блок, захват с губками, корпус которого установлен на направляющей блока с возможностью перемещения по ней, и приводы, о тл и ч а ю щ и и с я тем, что, с целью повышения надежности за счет сокращения количества приводов, в нем направляющая блока снабжена рейкой, закрепленной вдоль нее, и первым рычагом, подпружиненным и шарнирно закрепленным на одном ее конг це, а на другом конце направляющей установлен привод этого рычага, выполненньш в виде электромагнита, сердечник которого связан с ним тягой, а в корпусе захвата установлена поворотная втулка, на одном конце которой закреплено с возможностью взаимодействия с зубчатой рейкой колесо, а на другом шарнирно смонтированы.подпружиненные одна относительно другой губки захвата, причем в отверстии втулки установлен подпружиненный относительно нее в осевом направлении стерженьj на одном конце которого выполнен клин, so контактирующий с губками, а на другом - головка а на захвата шарнирно установлен дополнительный рьиаг, имеющий возможность взаимодействия с головкой стержня и с первым рычагом, кроме того, на основании с возможностью взаимодействия со стержнем захвата дополнию тельно . закреплен упор, на котором установлена шайба с возможностью перемещения вдоль его оси и подпружиненная в этом направлении.
Вид А Фиг г
;j
16
| Козьфев Ю.Г | |||
| Промышленные роботы: Справочник | |||
| - М.: Ма шностроение, 1983, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
