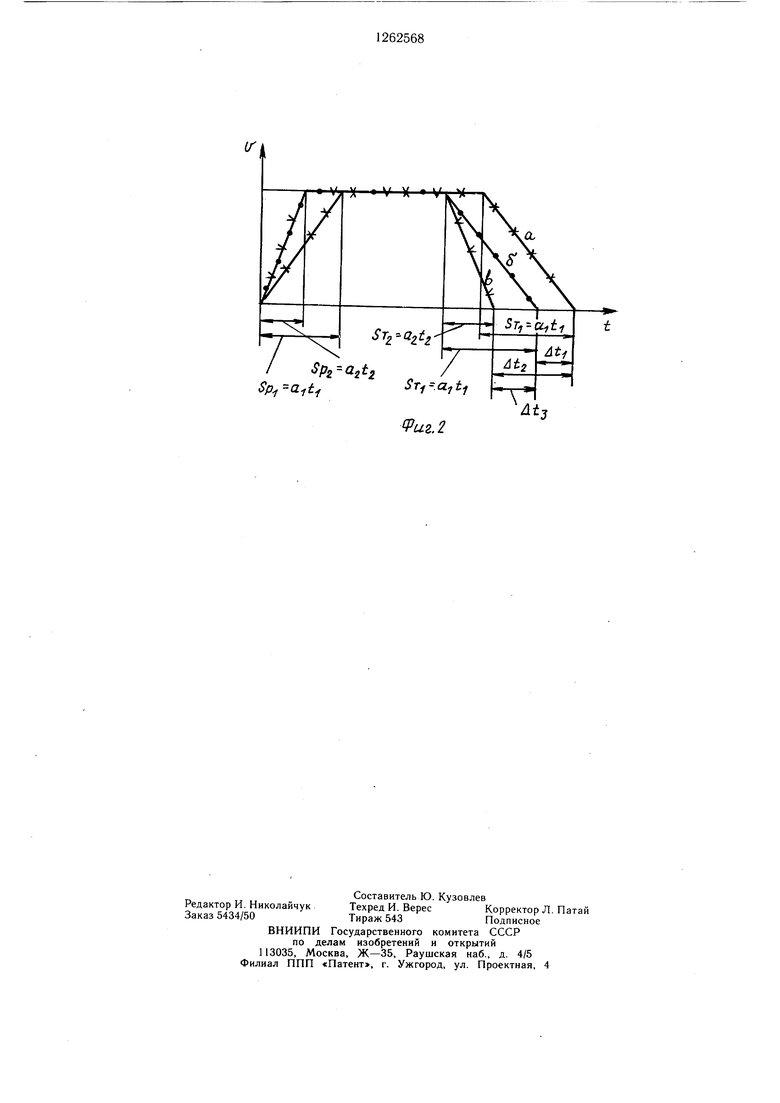
Изобретение относится к технике магнитной записи, а именно к устройствам автоматической подачи головок по заданным адресам. Цель изобретения - повышение быстродействия систем позиционирования. На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - графики движения позиционера (кривая а - при использовании двигателя с наихудшими параметрами в известном устройстве; кривая б - при использовании двигателя с наилучшими параметрами в известном устройстве; кривая в - при исдользовании двигателя с наилучшими параметрами в предлагаемом устройстве). Устройство содержит последовательно соединенные двоичный счетчик I разности, блок 2 ограничения кодового сигнала, цифроаналоговый преобразователь 3, блок 4 анализа ускорения позиционера и двоичный суммирующий счетчик 5, при этом блок 2 ограничения кодового сигнала выполнен с управляющим входом, подключенным к выходу суммирующего счетчика 5, вход запрета которого подключен к выходу блока 4 анализа ускорения позиционера, а счетный вход - к второму выходу счетчика 1 разности. Выход цифроаналогового преобразователя 3 подключен через функциональный преобразователь 6 к следящей системе позиционирования (не показана). Счетчик 1 предназначен для отсчета пути в двоичном коде. Назначение блока 2 - ограничение входного кода, поступающего от счетчика 1 разности, с целью уменьшения максимального значения скорости перемещения позиционера, которая пропорциональна входному коду. Кроме того, блок 2 ограничения кодового сигнала способствует уменьщению разрядности цифроаналогового преобразователя 3. В частном случае блок 4 анализа ускорения может быть выполнен в виде акселерометра. Назначение функционального преобразователя 6 состоит в обеспечении равнозамедленного движения позиционера при торможении. Преобразователь 6 представляет собою вычислитель функции извлечения квадратного корня из входного сигнала, отображающего пройденный позиционером путь. Устройство работает следующим образом. Двоичный код заданного адреса перемещения позиционера поступает на входы занесения счетчика 1 разности и проходит последовательные преобразования в блоке 2 ограничения кодового сигнала, цифроаналоговом преобразователе 3 и функциональном преобразователе 6, откуда он поступает в виде управляющего сигнала на следящую систему позиционирования, подключающую источник питания (не показан) через усилитель мошности (не показан) к исполнительному двигателю (не показан) системы позиционирования. В этот момент времени система позиционирования набирает скорость (фиг. 2) до значения, определяемого порогом ограничения кодового сигнала в блоке 2. Последний работает на этапе разгона позиционера в режиме неуправляемого ограничения, который формируется в блоке 2. При достижении позиционером заданного значения скорости движения разгон исполнительного двигателя системы позиционирования прекращается и блок 4 анализа ускорения вырабатывает сигнал, запрешающий отсчет в суммирующем счетчике 5 пройденных позиционером отрезков пути. Если при этом вес кода неуправляемого ограничения при сравнении в блоке 2 с весом кода от счетчика 5 (на момент запрета отсчета по сигналу от блока 4), более веса кода счетчика 5 блок 2 переходит в режим управляемого ограничения, разрешая прохождение кода со счетчика 1 на преобразователь 3 с «плавающим ограничение.м. Таким образом, счетчик 5 формирует кодовый сигнал перестройки порога ограничения блока 2 до значения, равного весу кода, отсчитанного суммирующим счетчиком 5 с учетом динамических характеристик системы позиционирования, определяемых блоком 4 анализа ускорения. Кроме того, счетчик 5 определяет момент торможения позиционера путем формирования управляющего сигнала на торможение системы позиционирования в момент равенства кодового сигнала от счетчика 1, соответствующего длине тормозного пути, кодовому сигналу счетчика 5, соответствующему длине пути разгона, чем и обеспечивается увеличение быстродействия системы позиционирования (фиг. 2). Формула изобретения Устройство для формирования управляющего сигнала системы позиционирования, содержащее последовательно соединенные Двоичный счетчик разности, блок ограничения кодового сигнала и цифроаналоговый преобразователь, отличающееся тем, что, с целью повышения быстродействия системы позиционирования, в него введены блок анализа ускорения позиционера и двоичный суммирующий счетчик, при этом блок ограничения кодового сигнала выполнен с управляющим входом, подключенным к выходу суммирующего счетчика, вход запрета которого подключен к выходу блока анализа ускорения позиционера, а счетный вход - к второму выходу счетчика разности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью движения позиционирующего механизма | 1987 |
|
SU1515198A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РАЗГОНА И ТОРМОЖЕНИЯ | 1991 |
|
SU1817583A1 |
| Система программного управления | 1982 |
|
SU1022116A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1341620A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Устройство для управления следящим приводом | 1987 |
|
SU1442975A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Устройство для управления позиционированием в ноль исполнительных органов станка | 1988 |
|
SU1571549A1 |
Изобретение относится к технике магнитной заниси, к устройствам автоматической подачи головок но заданным адресам. Суммирующий счетчик 5 формирует кодовый сигнал перестройки порога ограничения блока 2 ограничения кодового сигнала до значения, равного весу кода, отсчитанного счетчиком 5 с учетом динамических характеристик системы позиционирования, определяемых блоком 4 анализа ускорения. Счетчик 5 также определяет момент торможения позиционера путем формирования управляющего сигнала в момент равенства кодового сигнала от счетчика 1 разности, соответствующего длине тормозного пути, сл кодовому сигналу счетчика 5, равному длине пути разгона, чем и обеспечивается увеличение быстродействия системы позиционирования. 2 ил. Ю с: к ел О5 00
| Патент США № 4257074, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для управления положением магнитной головки | 1984 |
|
SU1140163A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для регулирования скорости движения позиционирующего механизма аппарата записи и воспроизведения информации | 1983 |
|
SU1094069A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Патент США № 3753254, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Патент Великобритании № 1485563, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США № 3699555, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
