Изобретение относится к машиностроительной и станкостроительной промышленности, а конкретно предназначено для автоматических -линий изготовления стягивающих стержней различной длины, например, для серийно выпускаемых секций котлоагре- гатов, пневматических или гидравлических цилиндров, на стягиваюш,их стержнях которых протачивается фаска, нарезается или накатывается резьба двусторонними автоматами с силовыми головками, расположенными по сторонам конвейера.
Цель изобретения - повышение надежности работы конвейера и обеспечение переналадки конвейера по ширине.
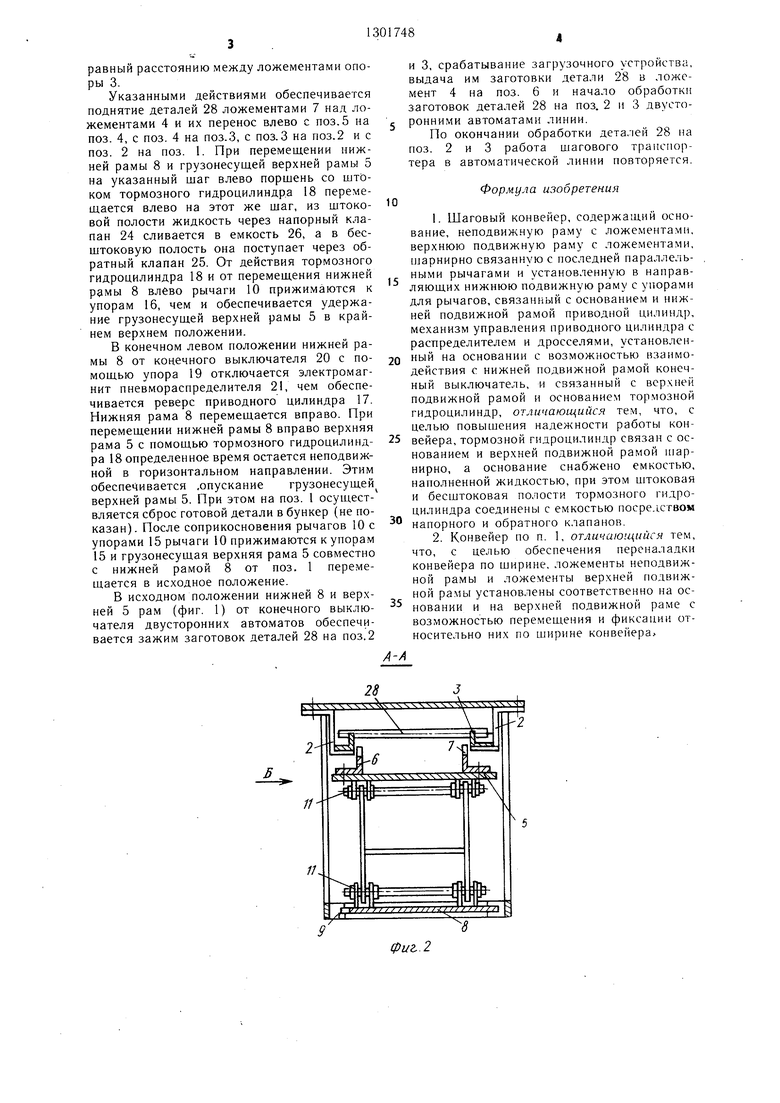
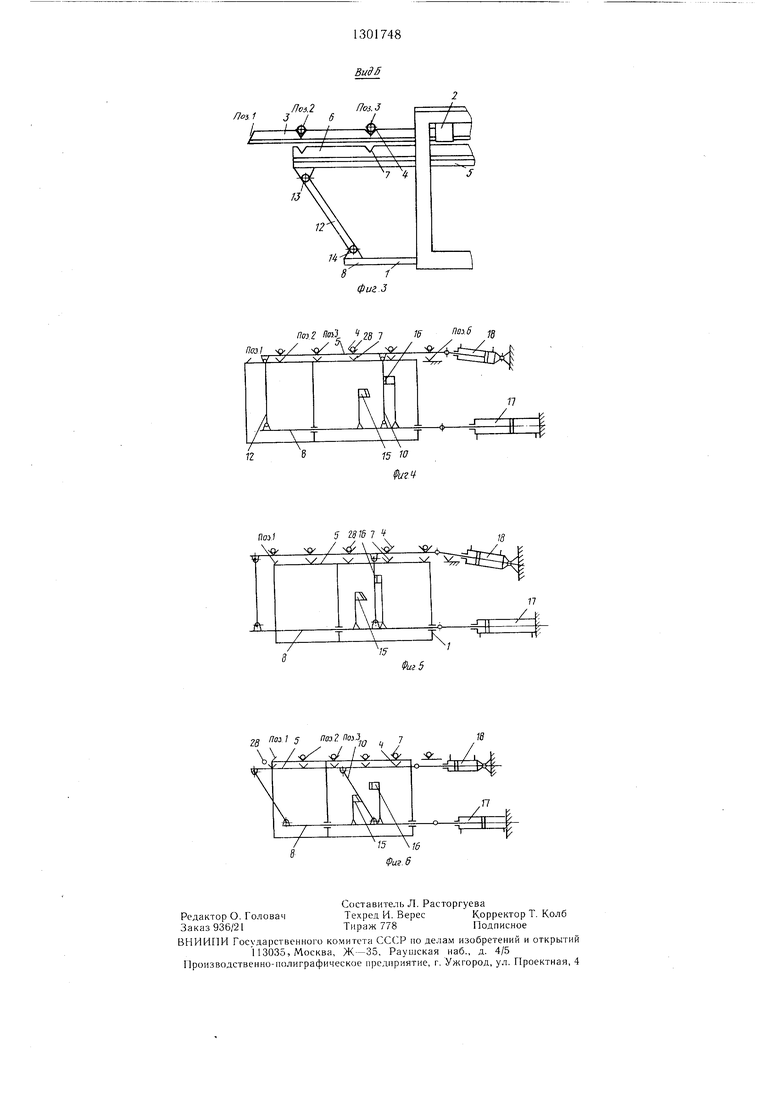
На фиг. 1 изображен схематично шаговый конвейер, обпхий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - верхнее позиционное положение подвижной грузонесуп ей верхней рамы с ложементами относительно исходного ее положения; на фиг. 5 - верхнее по- З иционное положение подвижной грузонесу- щей верхней рамы над рамой после ее перемещения влево на шаг, равный расстоянию между; автоматами, расположенными перед поз. 2 и поз 3; на фиг. 6 - нижнее позиционное положение подвижной грузонесу- шей верхней рамы в левом крайнем положении после опускания ее вниз, после чего она возврандается в свое исходное положение.
Шаговый конвейер содержит основание 1, установленную на основании 1 неподвижную раму с кронштейнами 2 и смонтированными на них опорами 3 с ложементами 4, верхнюю нодвижную раму 5, опоры 6 с ложементами 7, смонтирован Ные на верхней раме 5, нижнюю подвижную раму 8, заключенную в направляющие 9 основания 1, параллельные рычаги 10, связанные njap- нирами 1 1 с верхней 5 и нижней 8 рамами, комбинированный рычаг 12, расположенный параллельно рычагам 10 и связанный верхней частью 1нарниром 13 со средней частью верхней рамы 5 и нижними частями связанный с нижней рамой 8 шарнирами 14, разнесенными по ее ширине, уноры 15 и 16, прикрепленные к нижней раме 8, приводной цилиндр 17, связанный с нижней подвижной рамой 8 и основанием 1, тормозной гидроцилиндр 18, шарпир- но связанный с основанием 1 и верхней подвижной рамой 5, упор 19, прикрепленный к нижней раме 8, конечный выключатель 20, установленный на основании 1 с возможностью взаимодействия с нижней подвижной рамой 8, механизм управления приводного цилиндра 17 с пневмораспредели- телями 21 с односторонним электромагнитным управлением, дросселями 22 и обратными клапанами 23, напорные клапаны 24 и обратные клапаны 25, посредством которых связаны штоковая и бесштоковая полости тормозного гидроцилиндра 18 со смоп
тированной на основании 1 емкостью 26, наполненной жидкостью 27, и детали 28.
ЛожементЕ) 4 опоры 3 обозначены технологическими позициями поз. 1 - поз. 6.
На поз. 1 осуществляется сброс готовых деталей в бункер (не показан).
Ложементы 4 на поз. 2 и 3 снабжены зажимными устройствами, по сторонам которых размещены двусторонние перестраиваемые автоматы автоматической линии (не ноказаны), например, для снятия фасок на торцах деталей 28 в поз. 3 и нарезки или накатки резьбы в поз. 2.
Поз. 4 (которых может быть несколько) промежуточная, т. е. выполняет роль накопителя. На поз. 5 осуществляется поштучная загрузка деталей 28 загрузочным устройством (не показано). Опоры 3 с кронштейнами 2 и ложементами 4, а также опоры 6 с ложементами 7 могут перестанавливаться при наладке и закрепляться
соответственно относительно середины основания 1 и середины верхней рамы 5 на размер соответствующей длины обрабатываемых деталей 28 двусторонними автоматами линии. Причем перестановка опор 3 и их соответствующее крепление с помощью крон птейнов 2 к основанию 1 осуществляется с их зажимными устройствами.
Шаговый конвейер в режиме обработки деталей 28 двусторонними автоматами линии работает следуюн.1,им образом.
После обработки каждым двусторонним
автоматом деталей 28, зажатььх зажимными устройствами на поз. 2 « 3, от автоматов выдается общая команда на включение электромагнита пневмораснределите- ля 21. Воздух от пневмораспределителя 21 через обратный клапан 23 поступает в поршневую полость приводного цилиндра 17, скорость перемещения штока которого контролируется дросселем 22. Нижняя рама 8 вместе с упорами 15 и 16 перемещается влево (к поз. 1). При перемещении нижней
рамы 8 влево верхняя рама 5 остается неподвижной в горизонтальном направлении до мо.мента соприкосновения рычагов 10 с упорами 16.
Указанное неподвижное состояние верхней рамы 5 в горизонтально.м направлеНИИ обеспечивается тормозным гидроцилиндром 18 с помощью одного из его напорных клапанов 24.
При перемещении нижней ра.мы 8 влево и фиксации в горизонтальном направлении верхней рамы 5 рычаги 10 и комбиниро
ванный рычаг 12 лз наклонного положения принимают вертикальное. Этим обеспечивается перемещение грузонесущей верхней рамы 5 вверх, переход деталей 28 из ложементов опоры 3 в ложементы 7 опоры 6 грузонесущей верхней рамы 5. При соприкосновении рычагов 10 с упорами 16 верхняя рама 5 от переменления нижней рамы 8 начинает движение влево и перемещается на шаг.
равный расстоянию между ложементами опоры 3.
Указанными действиями обеспечивается поднятие деталей 28 ложементами 7 над ложементами 4 и их перенос влево с поз. 5 на поз. 4, с поз. 4 на поз.З, с поз.3 на поз.2 и с поз. 2 на поз. 1. При перемещении нижней рамы 8 и грузонесущей верхней рамы 5 на указанный шаг влево поршень со штоком тормозного гидроцилиндра 18 перемещается влево на этот же щаг, из штоко- вой полости жидкость через напорный клапан 24 сливается в емкость 26, а в бес- штоковую полость она поступает через обратный клапан 25. От действия тормозного гидроцилиндра 18 и от перемещения нижней рамы 8 влево рычаги 10 прижимаются к упорам 16, чем и обеспечивается удержание грузонесущей верхней рамы 5 в крайнем верхнем положении.
В конечном левом положении нижней рамы 8 от конечного выключателя 20 с помощью упора 19 отключается электромагнит пневмораспределителя 21, чем обеспечивается реверс приводного цилиндра 17. Нижняя рама 8 перемещается вправо. При перемещении нижней рамы 8 вправо верхняя рама 5 с помощью тормозного гидроцилиндра 18 определенное время остается неподвижной в горизонтальном направлении. Этим обеспечивается .опускание грузонесущей верхней рамы 5. При этом на поз. 1 осуществляется сброс готовой детали в бункер (не показан). После соприкосновения рычагов 10 с упорами 15 рычаги 10 прижимаются к упорам 15 и грузонесущая верхняя рама 5 совместно с нижней рамой 8 от поз. 1 перемещается в исходное положение.
В исходном положении нижней 8 и верхней 5 рам (фиг. 1) от конечного выключателя двусторонних автоматов обеспечивается зажим заготовок деталей 28 на поз.2
0
5
0
5
0
5
и 3, срабатывание загрузочного устройства, выдача им заготовки детали 28 в ложемент 4 на поз. 6 и начало обработки заготовок деталей 28 на поз. 2 и 3 двусторонними автоматами линии.
По окончании обработки деталей 28 на поз. 2 и 3 работа шагового транспортера в автоматической линии повторяется.
Формула изобретения
1. Шаговый конвейер, содержащий основание, неподвижную раму с ложементами, верхнюю подвижную раму с ложементами, HjapHHpHO связанную с последней параллельными рычагами и установленную в направляющих нижнюю подвижную раму с упорами для рычагов, связанный с основанием и нижней подвижной рамой приводной цилиндр, механизм управления приводного цилиндра с распределителем и дросселями, установленный на основании с возможностью взаимодействия с нижней подвижной рамой конечный выключатель, и связанный с верхней подвижной рамой и основанием тормозной гидроцилиндр, отличающийся тем, что, с целью повышения надежности работы конвейера, тормозной гидроцилиндр связан с основанием и верхней подвижной рамой шар- нирно, а основание снабжено емкостью, наполненной жидкостью, при этом штоковая и бесштоковая полости тормозного гидроцилиндра соединены с емкостью посредством напорного и обратного клапанов.
2. Конвейер по п. 1, отличающийся тем, что, с целью обеспечения переналадки конвейера по ширине, ложементы неподвижной рамы и ложементы верхней подвижной рамы установлены соответственно на основании и на верхней подвижной раме с возможностью перемещения и фиксации относительно них по ширине конвейера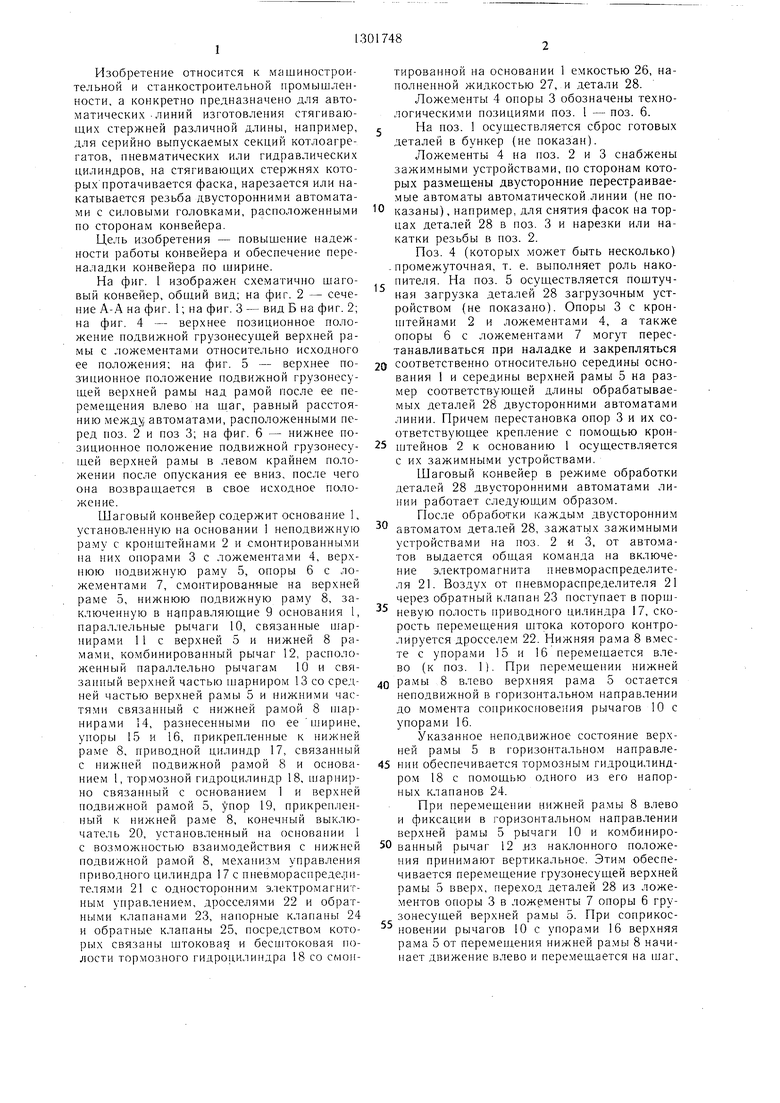
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1969 |
|
SU239113A1 |
| Шаговый конвейер | 1985 |
|
SU1305084A1 |
| Шагающий конвейер БНЧ-2 | 1982 |
|
SU1090638A1 |
| Шагающий конвейер | 1987 |
|
SU1465379A1 |
| Шаговый конвейер | 1988 |
|
SU1521682A1 |
| Шаговый конвейер | 1974 |
|
SU564230A1 |
| Линия для сборки узлов | 1989 |
|
SU1722771A1 |
| Шаговый конвейер | 1986 |
|
SU1393720A1 |
| Шаговый конвейер для транспортирования изделий типа тел вращения | 1985 |
|
SU1305083A1 |
Изобретение относится к машиностроительной и станкостроительной промышленности. Целью является повышение надежности работы конвейера и обеспечение переналадки конвейера по ширине. Конвейер содержит основание 1, неподвижную раму с ложементами 4 и верхнюю подвижную раму 5 с ложементами 7. Ложементы 4 и 7 установлены с возможностью перемещения и фиксации относительно основания 1 и рамы 5 по ширине конвейера. Б направляюш.их 9 основания 1 установлена нижняя подвижная рама 8, шарнирно связанная с рамой 5 параллельными рычагами 10. На основании 1 смонтирована емкость 26 наполненная жидкостью 27. К раме 8 прикреплены упоры 15 и 16. На основании 1 установлен с возможностью взаимодействия с рамой 8 конечный выключатель 20. С рамой 8 и основанием 1 связан приводной цилиндр 17. Механизм управления цилиндра 17 включает распределитель 21 и дроссель 22. С основанием 1 и рамой 5 шарнирно связан тормозной гидроцилиндр 18. Его штоковая и бес- штоковая полости соединены с емкостью 26 посредством напорного 24 и обратного 25 клапанов. В кон-ечном левом положении рамы 8 от выключателя 20 отключается электромагнит распределителя 21, обеспечивая реверс цилиндра 17. Рама 8 перемещается вправо. Рама 5 с помощью гидроцилиндра 18 определенное время остается неподвижной в горизонтальном направлении. Этим обеспечивается опускание рамы 5. После соприкосновения рычагов 10 с упорами 15 рычаги 10 прижимаются к упорам 15. Рама 5 совместно с рамой 8 перемещается в исходное положение. 1 з.п. ф-лы, 6 ил. S оо /7(73/ 4 . /7(7j.J J /7ол4 28 4 00 фиг.1 Воздук 21
Фиг,. 2
/7га г tol 25 716f
Поз ч)-Х О Л ху / О ,
Поэ (5 2816 7 V
о /
2д Яш ; /7и2 7 УУ 7-0 / /ю. Ч;
/
J7
/ Т
Составитель Л. Расторгуева
Редактор О. ГоловачТехред И. ВересКорректор Т Колб
Заказ 936/21Тираж 778Подписное
ВНИИГ1И Государственного комитета СССР но делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Т
5,б Фиг. б
| Судовая рулевая машина | 1972 |
|
SU477055A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
