ния одновременного съема нескольких изделий с одного уровня. Конвейер содержит установленные на. основании 1 наклонные 4 и горизонтальные 5 час ти неподвижной 2 и подвижной рам со ступенчатыми опорными поверхностями и привод перемещения-подвижной рамы. Наклонная 4 и горизонтальные 5 части кинематически связаны между собой с помощью параллелограммных механизмов. Они содержат двуплечие рычаги 7 и 8 с осями 9 и 10. Соединение осей 9 и 10 приводит к разнофазному перемещению наклонной 4 и горизонтальной 5 частей посредством силового .
1
Изобретение относится к конвейеро- строению, предназначено для транспортирования деталей типа тел враще- ния и может быть использовано в загрузочных устройствах робототехнологических комплексов, обслуживающих несколько единиц технологического оборудования, размещенных на разных уровнях.
Цепью изобретения является расщи- рение технологических возможностей конвейера путем обеспечения одновременного съема нескольких изделий с од него уровня.
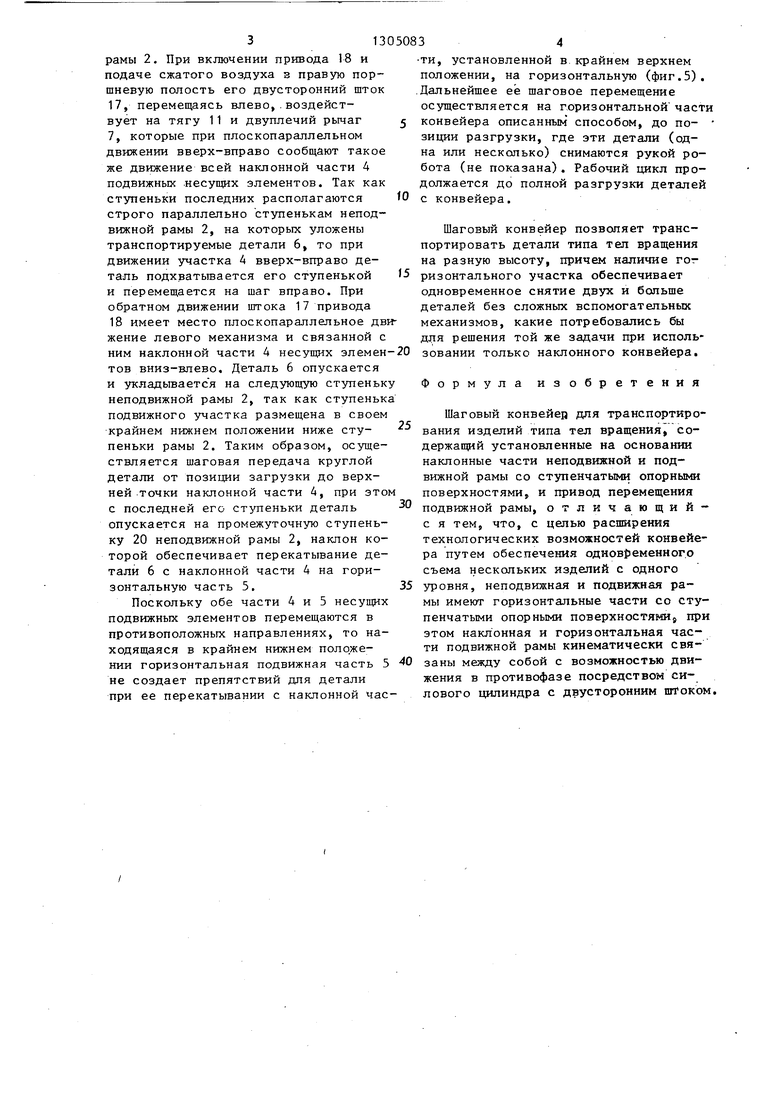
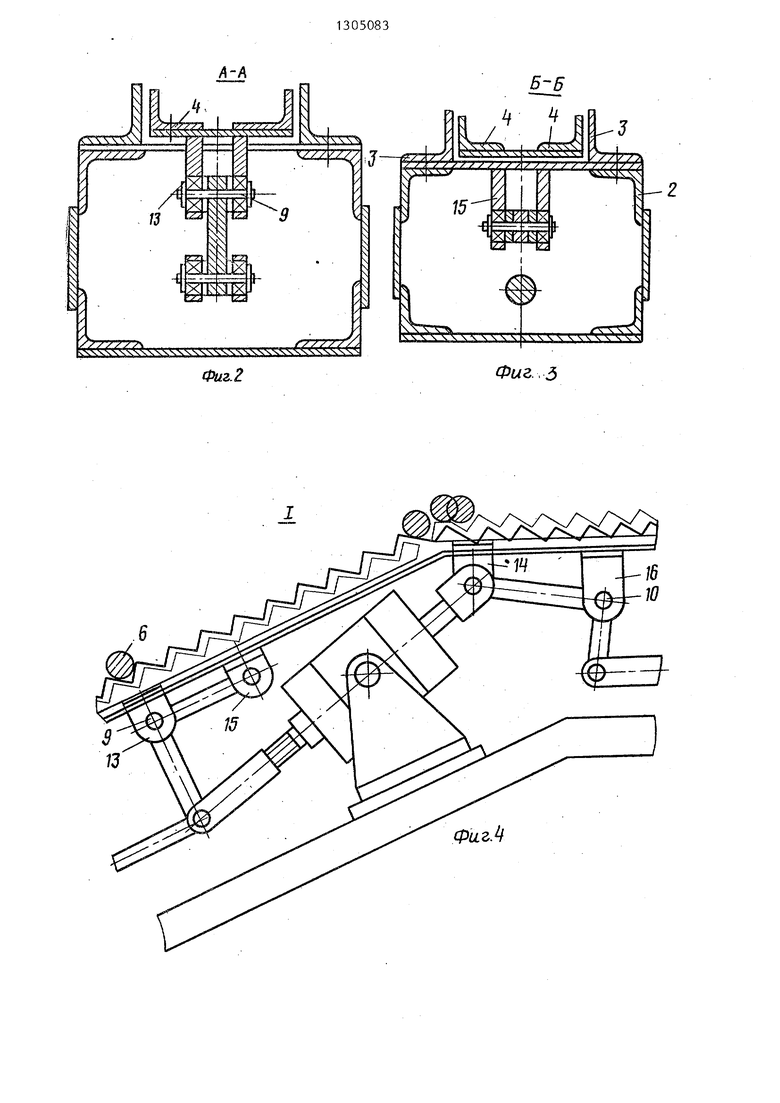
На фиг. 1 изображен конвейер, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1J на фиг. 4 - узел I на фиг. 1 (положение детали при перекатывании с наклонного згчастка на горизонтальньш)у на фиг. 5 - то же.
Шаговый конвейер содержит основание 1, на котором установлена неподвижная рама 2,- выполненная в виде ко- робчатой конструкции, имеющей наклонную и горизонтальную части с боковыми ступенчатыми опорными поверхностями 3. Внутри рамы размещены наклонная и горизонтальная 5 части подвижньк несущих элементов подвижной рамы, имеющей также ступенчатые опорные поверхности для деталей 6 круглого сечения. Подвижные элементы приводятся в движение с помощью шар
нирных параллелограммных механизмов.
цилиндра 18 с двусторонним штоком 17. При включении цилиндра 18 шток 17, перемещаясь влево, воздействует на рычаг 7 и тягу 11. Они при движении вверх-вправо сообщают такое же движение части 4. Так как ступеньки частей 4 расположены параллельно ступенькам рамы 2, то деталь подхваты- вается его ступенькой части 4 и перемещается на шаг вправо. Конвейер позволяет транспортировать детали типа тел вращения на разную высоту. Наличие горизонтального участка обеспечивает одновременное снят ие двух и больше деталей. 5 ил.
-
0
5
содержащих двуплечие рычаги 7 и 8 с осями 9 и 10 и тяги 11 и 12. Указанные механизмы связаны с наклонной 4 и горизонтальной 5 частями с помощью опор 13 и 14, а с неподвижной рамой 2 на тех же участках - с помощью опор 15 и 16. Каждый.из шарнирных параллелограммных механизмов соединен с двусторонним штоком 17 привода 18 перемещения подвижной рамы, шарнирно установленного на кронштейне 19 основания 1 . Соединение осей 9 и 10 двуплечих рычагов соответственно с подвижной наклонной частью 4 и неподвижной рамой 2 на горизонтальной части конвейера приводит к разнофазному перемещению наклонной и горизонтальной частей подвижных несущих элементов подвижной рамы, т.е. во время, подъема наклонного участка 4 подвиж- ньй горизонтальный участок 5 опускается.
Ступенька 20 неподвижной рамы 2 в месте перехода от наклонной к горизонтальной части вьтолнена с некот.о- рым наклоном в направлении горизонтального участка, обеспечивающим свободное скатывание транспортируемых деталей 6 с наклонной на горизонтальную .часть.
Шаговый конвейер работает следующим образом.
Загрузка деталей 6 осуществляется на позиции а, где детали укладываются на опорные ступеньки неподвижной
рамы 2. При включении привода 18 и подаче сжатого воздуха з правую поршневую полость его двусторонний шток 17, перемещаясь влево,.воздействует на тягу 11 и двуплечий рычаг 7, которые при плоскопараллельном движении вверх-вправо сообщают такое же движение всей наклонной части 4 подвижных несущих элементов. Так как ступеньки последних располагаются строго параллельно ступенькам неподвижной рамы 2, на которых уложены транспортируемые детали 6, то при движении участка А вверх-вправо деталь подхватьтается его ступенькой и перемещается на шаг вправо. При обратном движении штока 17 привода 18 имеет место плоскопараллельное двжение левого механизма и связанной с ним наклонной части 4 несущих элемен тов вниз-влево. Деталь 6 опускается и укладьшаетс я на следующую ступеньк неподвижной рамы 2, так как ступеньк подвижного участка размещена в своем крайнем нижнем положении ниже ступеньки рамы 2. Таким образом, осуществляется шаговая передача круглой детали от позиции загрузки до верхней точки наклонной части 4, при это с последней его ступеньки деталь
опускается на промежуточную ступеньку 20 неподвижной рамы 2, наклон которой обеспечивает перекатывание детали 6 с наклонной части 4 на горизонтальную часть 5.
Поскольку обе части 4 и 5 несущих подвижных элементов перемещаются в противоположных направлениях, то находящаяся в крайнем нижнем положении горизонтальная подвижная часть 5 не создает препятствий для детали при ее перекатывании с наклонной час
5
0 0
5
5
0
ти, установленной в крайнем верхнем положении, на горизонтальную (фиг.5).
.Дальнейшее её шаговое перемещение осуществпяется на горизонтальной части конвейера описанным способом, до по- зиции разгрузки, где эти детали (одна или несколько) снимаются рукой робота (не показана). Рабочий цикл продолжается до полной разгрузки деталей с конвейера.
Шаговый конвейер позволяет транспортировать детали типа тел вращения на разную высоту, причем наличие горизонтального участка обеспечивает одновременное снятие двух и больше деталей без сложных вспомогательных механизмов, какие потребовались бы ддя решения той же задачи при использовании только наклонного конвейера.
Формула изобретения
Шаговый конвейер дпя транспортирования изделий типа тел вращения, содержащий установленные на основании наклонные части неподвижной и подвижной рамы со ступенчатыми опорными поверхностями, и привод перемещения подвижной рамы, отличающий- с я тем, что, с цепью расширения технологических возможностей конвейера путем обеспечения однов)еменного съема нескольких изделий с одного уровня, неподвижная и подвижная рамы имеют горизонтальные части со ступенчатыми опорными поверхностямиJ при этом наклонная и горизонтальная части подвижной рамы кинематически связаны между собой с возможностью движения в противофазе посредством силового цилиндра с двусторонним пггоком.
Л-А
Фиг. 2
Фмг.З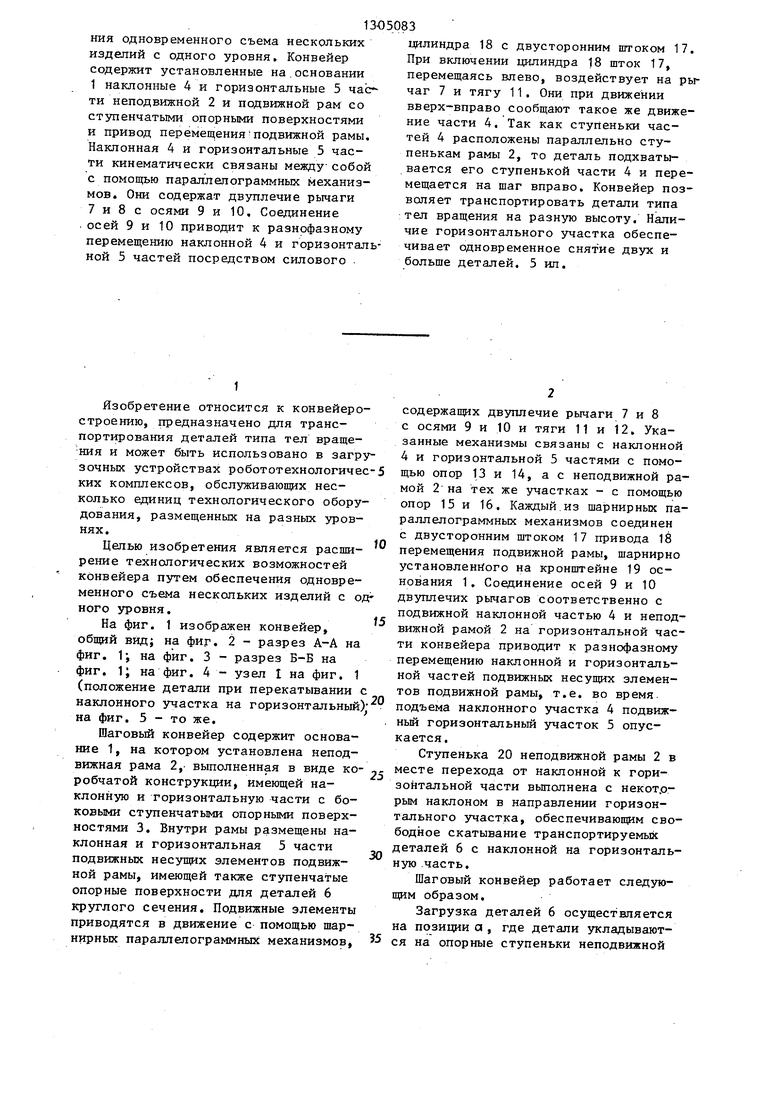
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер А.П.Макарова | 1985 |
|
SU1301748A1 |
| Шаговый конвейер | 1974 |
|
SU564230A1 |
| Шагающий конвейер | 1987 |
|
SU1465379A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |
| Шаговый конвейер для перемещения труб | 1991 |
|
SU1838218A3 |
| Шагающий конвейер | 1981 |
|
SU988690A1 |
| Шагающий конвейер | 1982 |
|
SU1022894A1 |
| Шаговый конвейер | 1980 |
|
SU933571A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU770947A1 |
| Шагающий конвейер | 1978 |
|
SU804551A1 |
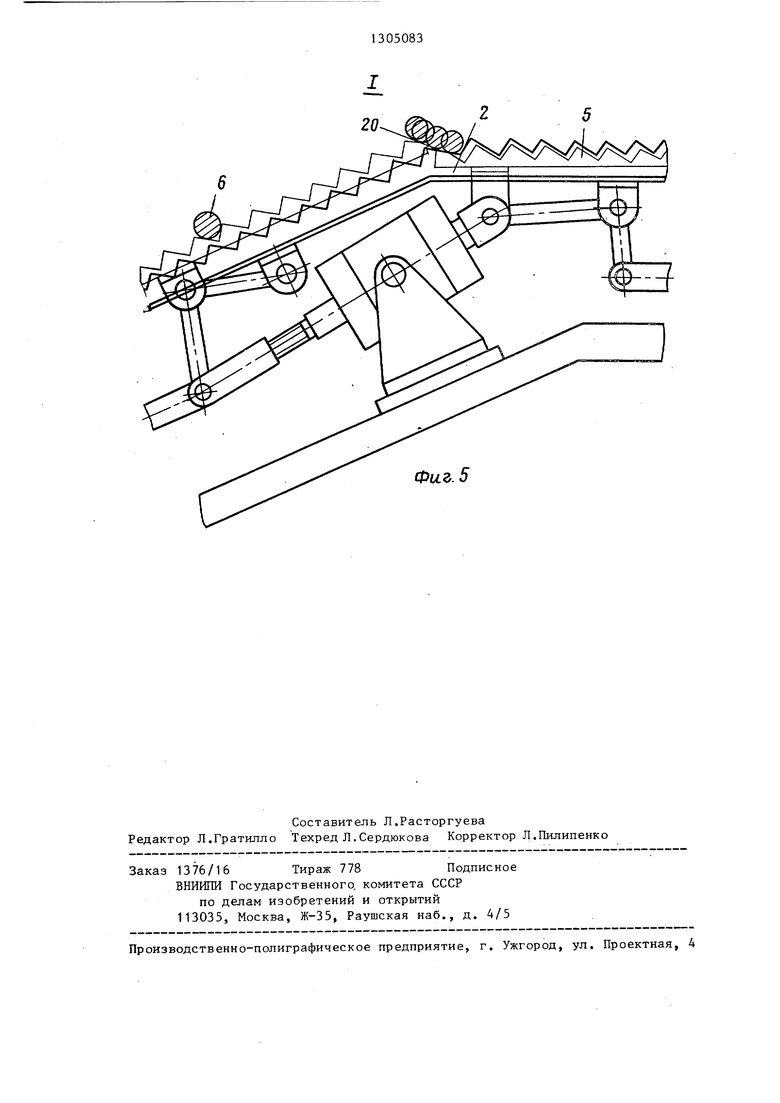
Изобретение относится к конве- йеростроению и предназначено для использования в загрузочных устройствах робототехнологических комплексов, обслуживающих несколько единиц технологического оборудования, размещенных на разных уровнях. Целью является расширение технологических возможностей конвейера путем обеспечеv 17 (Л со о О О 00 00 Фиг.1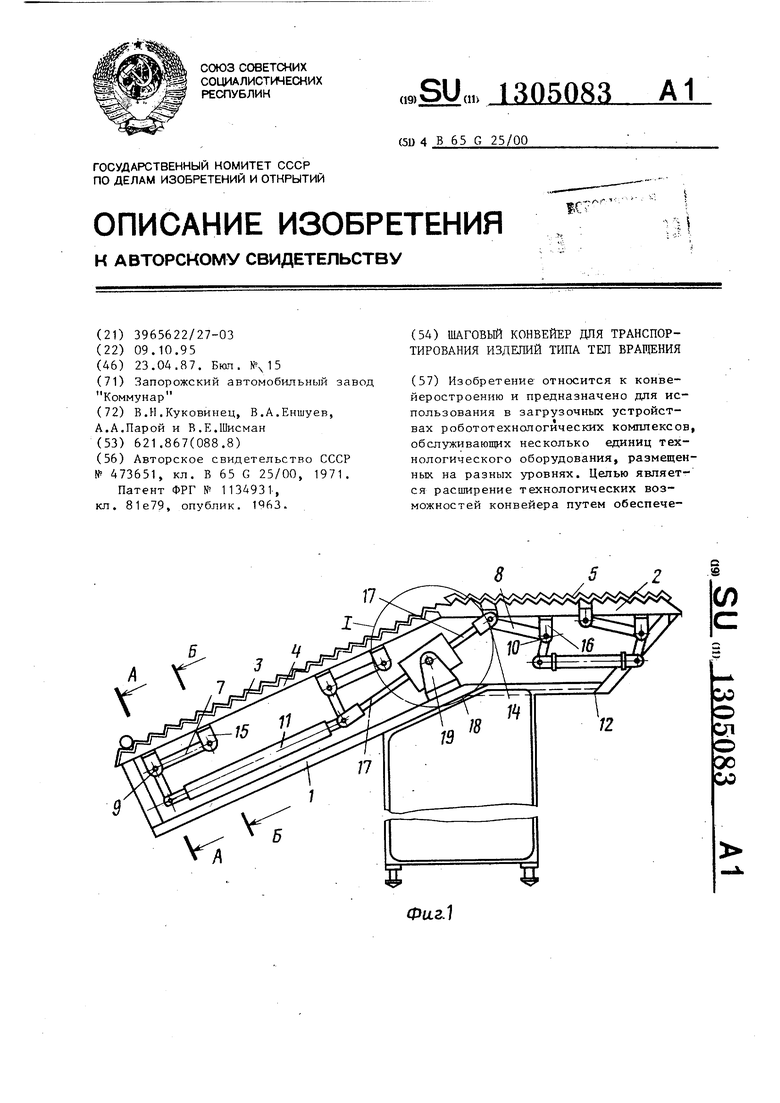
ФигМ
Фиг. 5
| Аговый конвейер | 1971 |
|
SU473651A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| 0 |
|
SU113493A1 | |
| Горный компас | 0 |
|
SU81A1 |
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
