сл
со ;о
о ел
последнем расположены поворотные опоры с приводными роликами, смонтированными на валу 1 под углом к его продольной оси. Поворотные опоры выполнены в виде Г-образных рычагов 6 с цилиндрическими головками 7. Вторая половина С 4 опирается на размещенный на основании опорный вал через опорные ролики. На С 4 закреплены регули- упор 21 и регулируемый ограничитель 22 и размещены параллельные тяги 11 и 12, шарнирно соединенные между собой щарнирно закрепленными на С 4 основным 13 и дополнительным 14 рычагами. Концы тяг 11 и 12 шарнирно связаны с рычагами 13 и 14, образуя шарнирный параллелограмм. Каждая тяга
выполнена с пазами 16. Тяга 12 посредством установленной на С 4 пружины 19 поджата к упору 21. На основании жестко закреплена копирная линейка 24 и установлен останов в виде подвижного в вертикальной плоскости стопора 23, Для замедления движения С 4 рычаг 14 взаимодействует с линейкой 24. Приводные ролики взаимодействуют с рычагами 6, которые контактируют с пазами 16 тяг 11 и 12. Для остановки С 4 рычаг 14 взаимодействует со стопором 23 и упором 22. При повороте рычага 14 изменяется угол наклона приводных роликов, и С 4 тормозится. 2 з.п. ф-лы, 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейер | 1986 |
|
SU1313775A1 |
| Устройство для поддержания заготовки в процессе обработки | 1987 |
|
SU1489882A1 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1036648A1 |
| Автомат для калибровки и испытания цепей | 1987 |
|
SU1416233A1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО РОБОТИЗИРОВАННОЙ ЛИНИИ СБОРКИ-СВАРКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1990 |
|
SU1737838A1 |
| Устройство для кислородной резки цилиндрических заготовок | 1979 |
|
SU789252A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Карусельная формовочная установка | 1982 |
|
SU1106658A1 |
| Пресс для брикетирования волокнистых материалов | 1982 |
|
SU1090585A2 |
Изобретение относится к машиностроению и предназначено для осуществления сборочных и обрабатывающих операций. Цель - расширение технологических возможностей устройства путем обеспечения регулирования скорости перемещения спутника (С). На основании устройства размещен приводной вал 1, на котором установлен С 4. На
1
Изобретение относится к машиностроению, в частности к устройствам для транспортирования, и предназначено для осуществления сборочных и обрабатывающих операций.
Цель изобретения - расширение технологических возможностей устройства путем обеспечения регулирования скорости перемещения спутника.
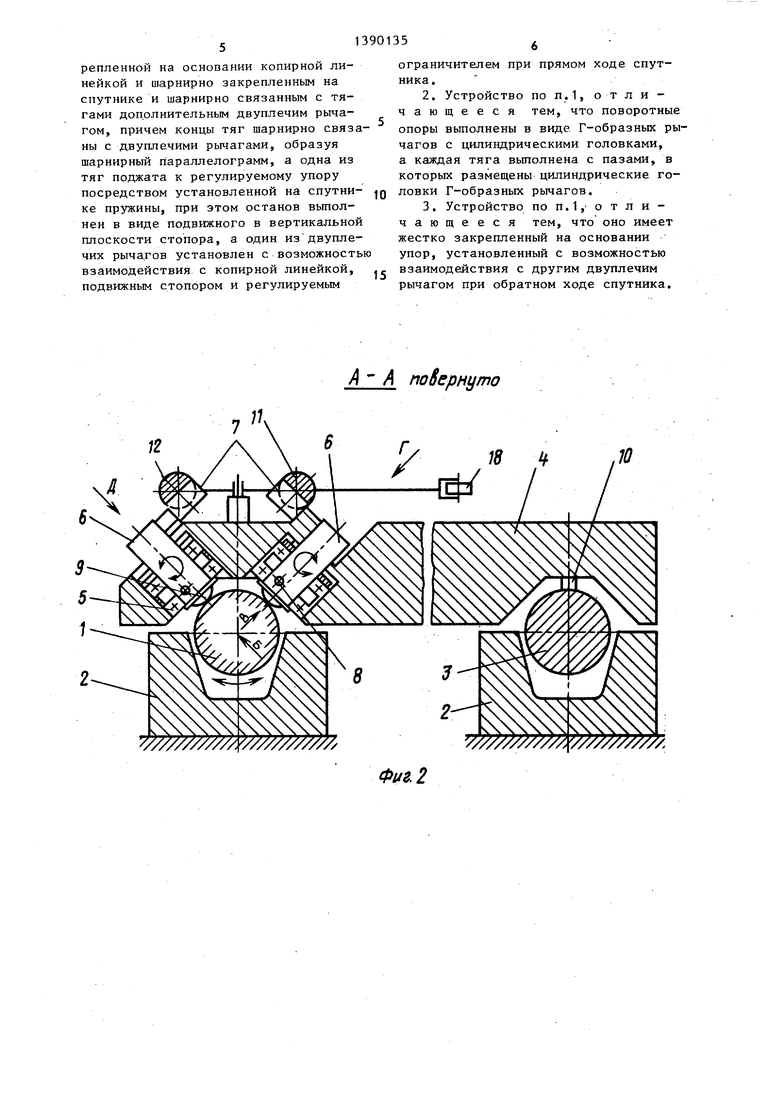
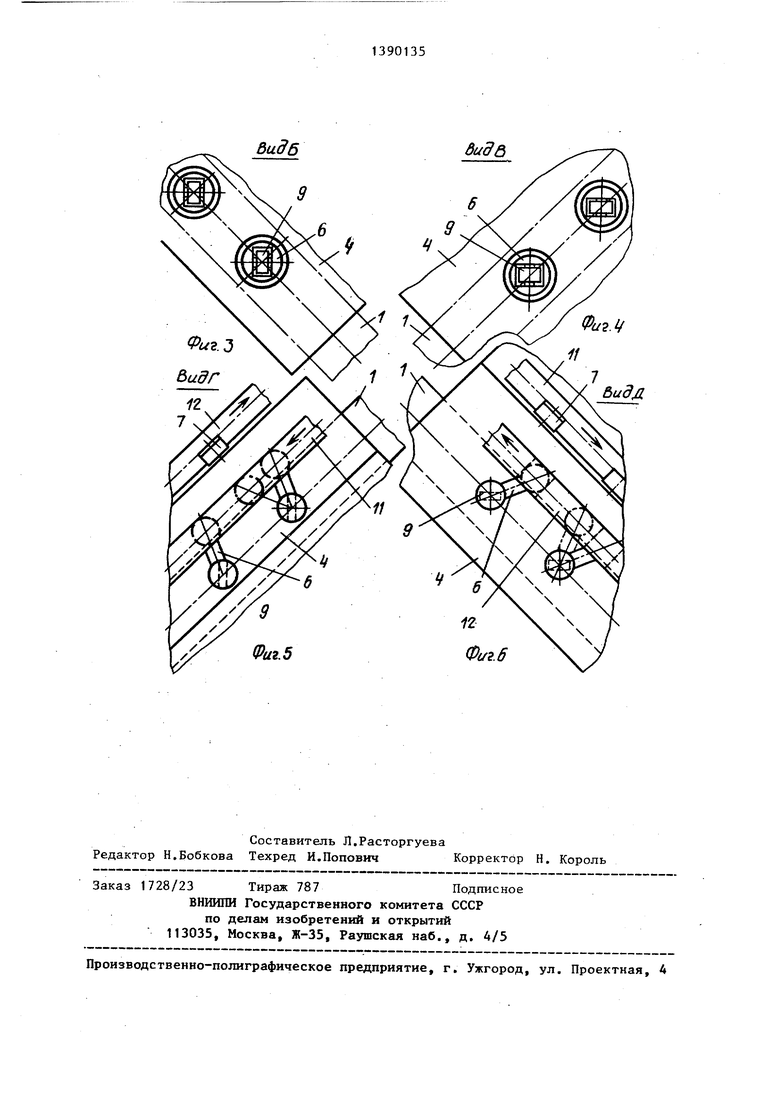
На фиг.1 показано устройство, вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг.З - вид Б на фиг.2 (положение приводных роликов относительно ведущего вала снизу); на фиг.4 - вид В на фиг.2; на фиг.З - вид Г на фиг.2 (положение Г-образных рычагов, пазов тяг и ведущих роликов относительно ведущего вала сверху; нафиг.6 вид Д на фиг.2.
Устройство для перемещения груза содержит приводной вал 1, установленный на подшипниках и проходящий внутри соединительного профиля 2 основания. Параллельно приводному валу 1 неподвижно установлен опорный вал 3, также проходящий внутри соединительного профиля 2. На обоих валах 1 и 3 установлены спутники 4. В корпусе спутника на подшипниках 5 расположены поворотные опоры в виде наклонно смонтированных Г-образных качающихся рычагов 6 с цилиндрическими головками
половина спутника опирается на опорный вал 3 через опорные ролики 10. На спутнике 4 размещены параллельные тяги 11 и 12, связанные между собой основным 13 и дополнительным 14 двуплечими рычагами, каждый из которых шарнирно за.креплен на спутнике и шарнирно связан с тягами 11 и 12. Причем концы тяг 11 и 12 шарнирно связаны с двуплечими рычагами 13 и 14 с
помощью шарниров 15, образуя шарнирный параллелограмм. Каждая тяга 11 и 12 выполнена с наклонными пазами 16, в которых размещены цилиндрические головки 7 Г-образных рычагов.
Двуплечие рычаги 13 и 14 установлены на спутниках 4 с помощью шарнирных опор 17. На концах рьиагов 13 и 14 расположены ролики 18. Возвратная пружина 19 одним концом связана |C тягой 11, а другим через упор 20 с корпусом спутника 4. Торец тяги 12 под воздействием усилия возвратной пружины 19 поджимается к регулируемому упору 21, закрепленному на торце
спутника 4. С помощью закрепленного на спутнике 4 регулируемого ограничителя - упора 22 - осуществляется ог
раничение поворота рычага 14 и плавный останов спутника в требуемом положении при прямом ходе спутника 4.
При этом упор 22 через ролик 18 рычага 14 может взаимодействовать при прямом ходе.спутника 4 с остановом в виде подвижного в вертикальной плоскости стопора 23, установленного на основании. На основании жестко закреплена копирная линейка 24, которая установлена в требуемом месте и при воздействии на ролик 18 двуплечего рычага 14 при прямом ходе спутника 4 производит замедленное перемещение спутника. Устройство имеет жестко закрепленный на основании упор 2.5, который при взаимодействии с роликом 18 двуплечего рычага 13 производит плавньй останов спутника 4 при его быстром обратном ходе в начальное положение.
Обратный ход спутников может производиться по другому пути - на нижнем уровне (не показано).
Градуированная шкала 26, расположенная напротив рычага 14, служит для регулирования величины постоянной скорости спутника с помощью регулируемого упора 21.
Устройство работает следующим образом.
С помощью упора 21 постоянной скорости по шкале 26 через систему рычагов 13 и 14 и тяг 11 и 12 устанавливают требуемую постоянную скорость за счет изменения угла наклона приводных роликов 9 относительно цилиндрической образующей приходного вала 1. Далее от асинхронного двигателя приводят во вращение вал 1, и приводные ролики 9, насаженные под углом к цилиндрической образующей приводного вала, совершая винтообразные движения, начинают перемещать спутник в необходимом направлении. Если требуется на определенном.участке пути замедленное перемещение спутника, рычаг 14 через ролик .18 начинает контактировать с копирной линейкой 24, установленной на этом участке пути. При этом приводные ролики 9 от воздействия Г-образных рычагов 6, которые контактируют своими головками 7 с наклонными пазами 16 тяг 11 и 12, связанных с рычагами 13 и 14, начина- ют изменять угол наклона относительно приводного вала 1. Спутник 4 начинает перемещаться с меньшей скоростью.
0
5
.,«
5
хотя приводной вал вращается с постоянной частотой.
Если требуется на определенном участке пути осуществить плавный останов -спутника, в работу вступает вьщвижной стопор 23. С ним начинает контактировать ролик 18 двуплечего рычага 14 и последний от движения спутника 4 поворачивается до соприкосновения с упором 22 ограничения поворота рычага 14. На углу поворота двуплечего рычага 14 происходит рав- нозамедленное торможение спутника за счет уменьшения угла наклона приводных роликов 9 относительно образующей вала 1. Величина тормозного пути регулируется с помощью упора 22. В момент останова упор 22. через ролик 18 упирается в вьщвижной стопор 23. Для осуществления дальнейшего перемещения спутника выдвижной стопор 23, плавно опускаясь вниз, освобождает рычаг 14. Под воздействием возвратной пружины 19 система рычагов поворачивается до соприкосновения с упором 21. Происходит равноускоренное перемещение спутника до тех пор, пока он не начнет перемещаться с постоянной скоростью. В конце пути также происходит плавный останов спутника. Из конечного положения спутник, по нижнему уровню (не показано), быстро возвращают в начальное положение. В конце быстрого отвода рычаг 13 че- рез ролик 18 взаимодействует с упором 25 и аналогичным образом плавно останавливает спутник 4.
0
5
Формула изобретения
/4 - И повернуто
12
ограничителем при прямом ходе спутника.
2,Устройство по п,1, отличающееся тем, что поворотные опоры выполнены в виде Г-образных рычагов с циливдрическими головками,
а каждая тяга вьтолнена с пазами, в которых размещены цилиндрические головки Г-образных рычагов.
Ю
Фие.2
5идб
дидб
&идд
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Двухсторонняя ключевая схема на полупроводниковых триодах | 1959 |
|
SU131377A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
