94)
:
13 S
со ел
05
СОг/е.7
Изобретение отрюсится к подъемно- транспортным механизмам и может быть |использовано для грузов, изменяющих положение в пространстве во время транспортировки.
Цель изобретения повышение надежности работы„
На фиг.1 показан конвейер общий вид; на фиг, 2 - вид А на фт.г.; на фигеЗ - подвеска со сдвоенным механиз ном поворота, вариант выполнения. Подвесной грузонесущий конвейер :включает ходовой путь 1 с перемещаемы ;ми по нему тяговым органом 2 каретка- I ми 3 с подвесками 4, оснащенными ра- I мой 5iC закрепленными на ней захвата- мя 6 для изделий 7 и механизмом 8 по : ворота захватов 6, В местах проведения технологических операций на трас- се конвейера установлен упор 9 для взаимодействия с корпусом механизма поворота. Корпус 10 механизма поворота захват.ов выполнен снаружи с продольными копирными пазами 11, а ме- ханизм 8 поворота захватов 6 выполнен в виде планетарного редуктора 12 входной вал 13 которого жестко прикреплен- к раме 5, а выходной вал.14 кинематически связан посредством цеп- ной передачи 15 с захватами 6 изделий 7-, Планетарный редуктор 12 состоит из шестерни 16 с внутренним зацеплением, водила 17, закрепленного на корпусе 10, на котором установле- ны две шестерни 18 и 19, связанные общей ступицей 20, На выходном .валу 14 закреплена шестерня 2i с наружным зацеплением. При повороте корпуса 10 под действием упора 9 шестерни взаи- модействуют между собой и поворачивают захваты 6 на требуемый угол. Для исключения случайного поворота корпуса 10 он снабжен подпружиненным стопором 22, а рама 5 - фиксатором 23, Для поворота подвески 4 в горизонтальной плоскости ее грузонесущая штанга разделена на неподвижную и подвижную части шарниром 24 с фиксатором 25, На наружной поверхности корпуса 10 выполняют от одного до нескольких продольных копирных пазов 11, В зтом случае вдоль трассы конвейера устанавливают несколько упоров 9, Поворот подвески во взаимно перпендикулярных плоскостях осуществляют при помощи дополнительного механизма 8 поворотаf установленного вертикально и кинематически связанного с основным механизмом 8 поворота, установленным горизонтально (фиг.З),
Подвесной грузонесущий конвейер работает следующим образом.
Тяговым органом 2 каретки 3 с подвеской 4 перемещаются по ходовому пути 1 конвейера. В местах проведения технологических операций корпус IQ механизма поворота своим копирным пазом 11 наезжает на упор 9. В результате перемещения упора 9 по продольно му копирному пазу 11 корпус 10 поворачивается, а в результате взаимодействия шестерен планетарного редуктора 12 между собой захваты 6 с изделих ми 7 поворачиваются на нужный угол ос гласно технологическому процессу. Для поворота подвески в горизонтальной плоскости извлекают фиксатор 25 из шарнира 24, поворачивают подвеску на требуемый угол и фиксируют фиксатс ром 25.
Для осуществления последовательного поворота груза вокруг горизонтальной и вертикальной осей используют два поворотных механизма, управляемых каждый своим упором 9, который взаимодействует с копирным пазом 11, расположенным на боковой или торцовой поверхностях корпуса 10.
Формула изобретения
Подвесной грузонесущий конвейер, включающий ходовой путь с перемещаемыми по нему тяговым органом каретками с подвесками в виде рамы с закрепленными на ней захватами для грузов и корпуса механизма поворота захватов для груза, и упор, установленный в местах проведения технологических операций, отличающий ся тем, что, с целью повьш1ения надежности работы, корпус механизма поворота захватов выполнен снаружи с продольными копирными пазами, а механизм поворота захватов - в виде планетао- ного редуктора, выходной вал которого кинематически связан посредством цепной передачи с захватами для грузов, при этом упор установлен с возможностью взаимодействия с одним из продольных копирных пазов.
1 J Ь
I If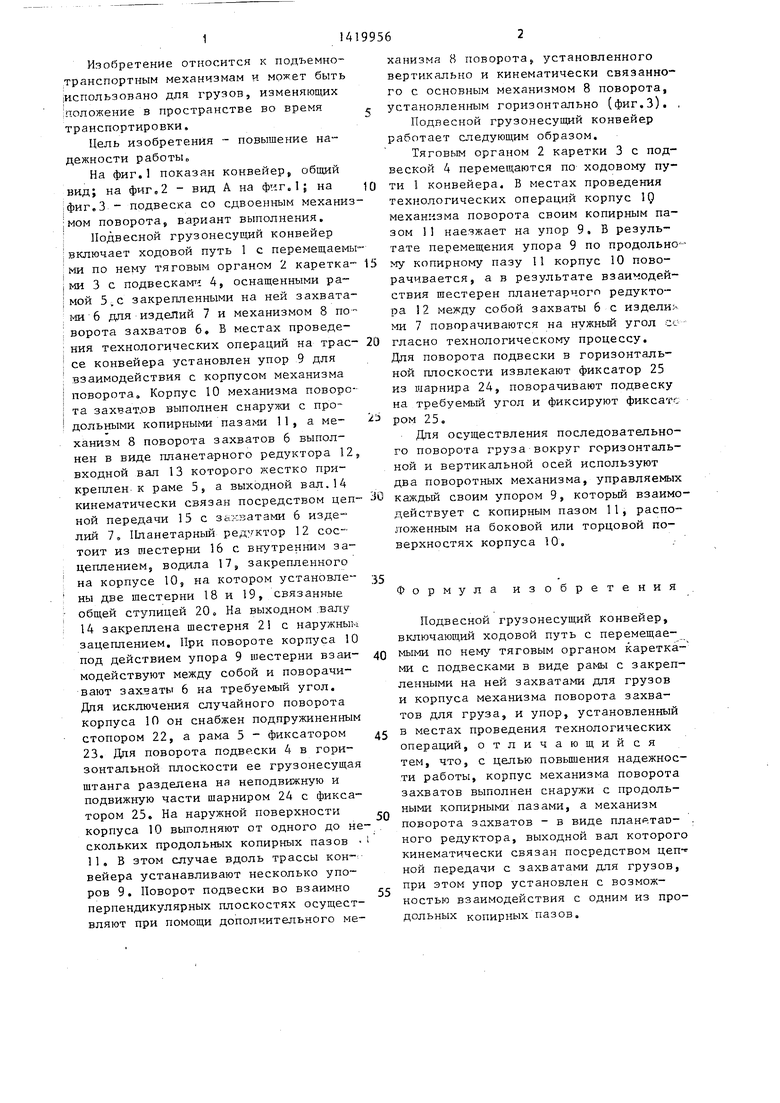
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной грузонесущий конвейер | 1987 |
|
SU1446062A1 |
| Подвесной грузонесущий конвейер | 1988 |
|
SU1616846A1 |
| Подвесной конвейер | 1990 |
|
SU1722978A2 |
| Подвесной конвейер для транспортирования длинномерных грузов | 1971 |
|
SU449857A1 |
| Подвесной грузонесущий конвейер | 1988 |
|
SU1532460A1 |
| Подвесной грузонесущий конвейер | 1987 |
|
SU1490038A1 |
| Подвесной грузонесущий конвейер | 1990 |
|
SU1745635A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Подвесной грузонесущий конвейер | 1986 |
|
SU1330047A1 |
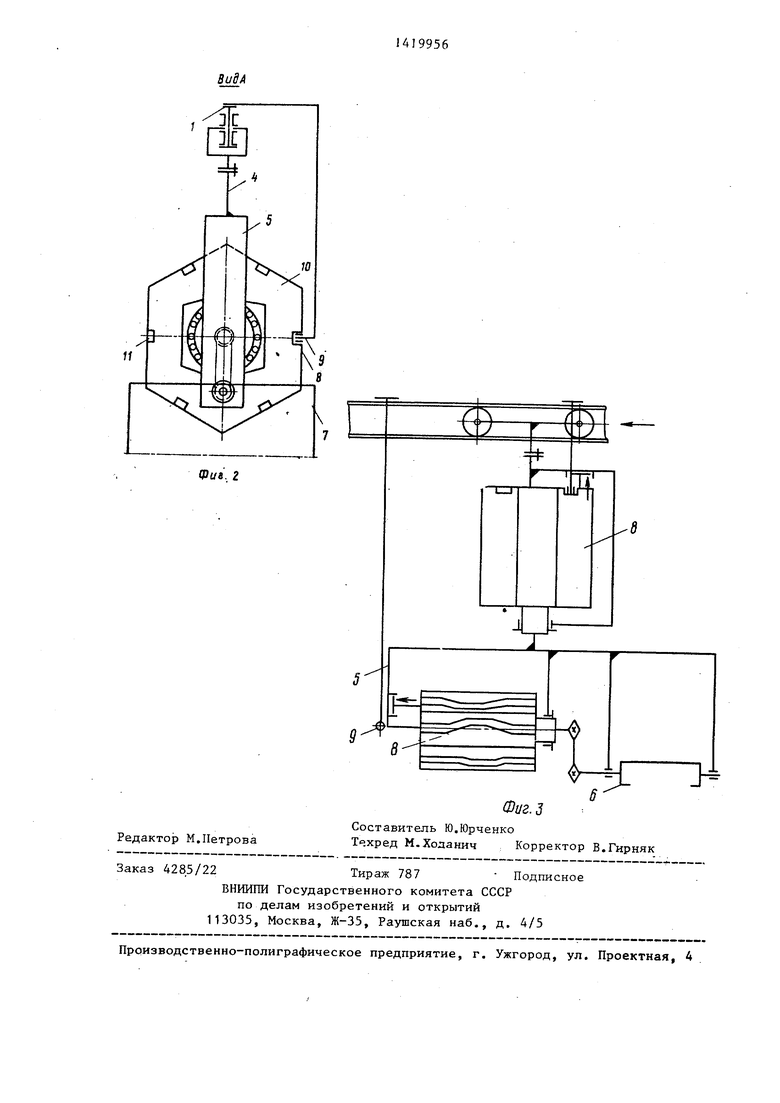
Изобретение относится к подъемно-транспортным механизмам. Цель изобретения - повышение надежности работы. По ходовому пути 1 посредством тягового -органа 2 перемещаются каретки 3 с подвесками 4. Последние оснащены рамой 5 с закрепленными на ней захватами 6 для грузов 7 и механизмом 8 поворота захватов- 6. Корпус 10 механизма 8 выполнен с продольными копирными пазами, а механизм 8 выполнен в виде планетарного редуктора 12, выходной вал 14 которого кинематически связан посредством цепной передачи 15 с захватами 6. В местах проведения технологических операций установлен упор 9. В местах проведения технологических операций корпус 10 пазом наезжает на упор 9. В результате перемещения упора 9 по пазу корпус 10 поворачивается, а в результате взаимодействия шестерен редуктора 12 между собой захваты 6 с грузом 7 поворачиваются на нужный угол согласно технологическому процессу. 3 ил. сл
| ПОВОРОТНАЯ ПОДВЕСКА ГРУЗОНЕСУЩЕГО КОНВЕЙЕРА | 0 |
|
SU331006A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Подвесной конвейер | 1971 |
|
SU437668A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
