Изобретение относится к машиностроению и может быть использовано при создании транспортных роботов.
Целью изобретения является упрощение конструкции устройства о
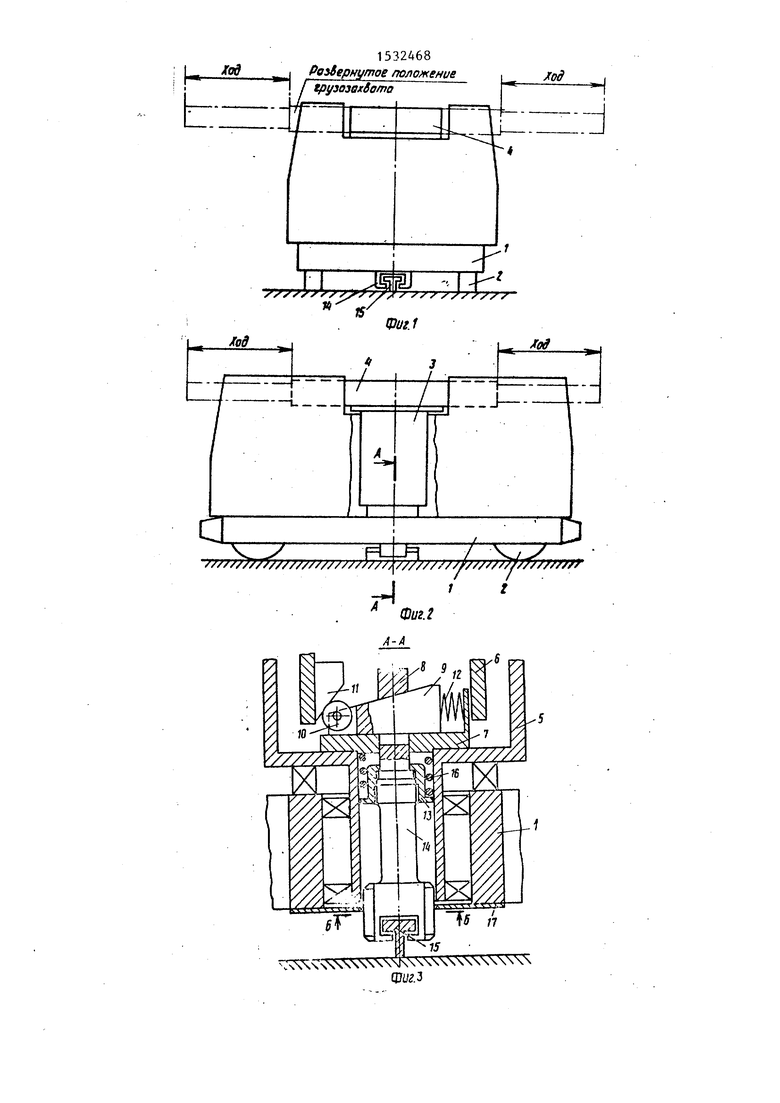
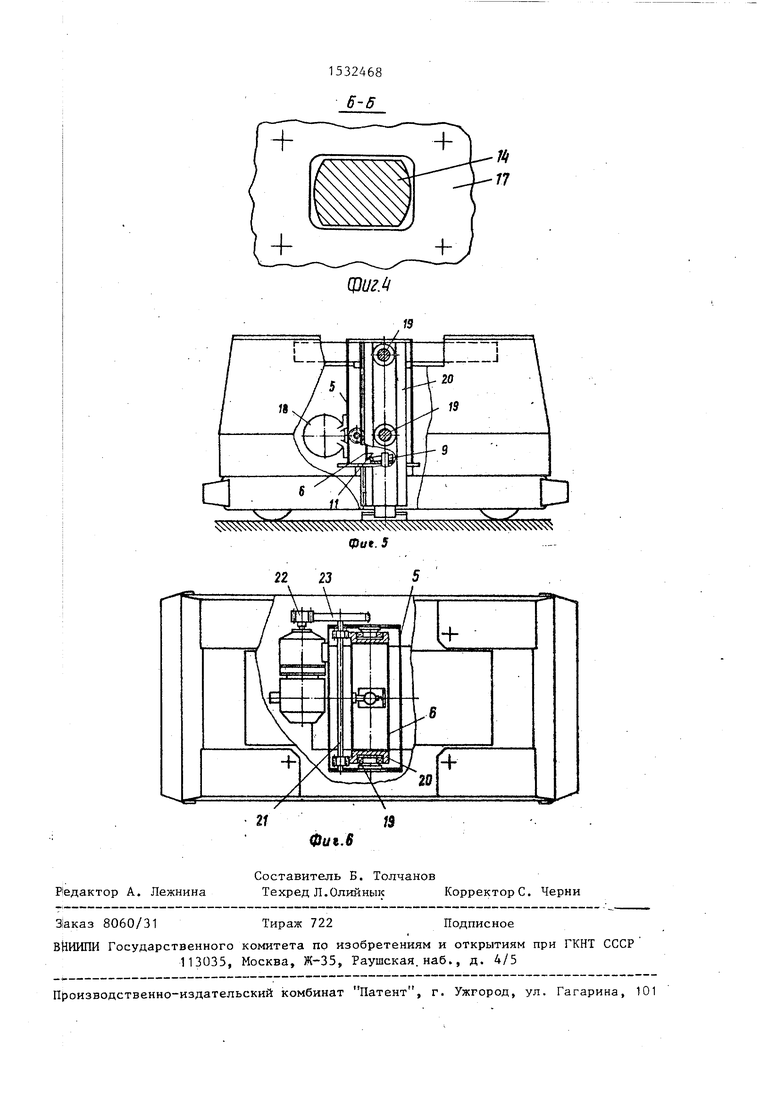
На фиг. 1 схематически изображено предлагаемое устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг.5 - устройство, вид сбоку С вырезом в средней части; на фиг. 6 - то же, вид сверху.
Устройство для транспортирования изделий состоит из самоходной тележ- |ки 1 с катками 2, на которой установлена подъемно-поворотная платформа 3 с телескопическим грузозахватом 4. Подъемно-поворотная платформа 3 содержит поворотную часть - опору 5 к подъемную часть - стол 6, к которому непосредственно крепится телескопичгский грузозахват 4, На поворотной опоре 5 смонтировано основание 7, на кэтором установлен шток 8 с пазом, в кэтором перемещается клиновой толкатель 9 через ролик 10, взаимодействующий с клином,11, закрепленным на 6.
j Силовое замыкание толкателя 9 в П|азу штока 8 обеспечивается пружиной 12. К нижней части штока 8 при помощи накидной гайки 13 присоединен захват 14, взаимодействующий с анкерами 15, расположенными по трассе движения тележки возле позиций передачи груза. Зазоры в механизме выбираются пружиной 16. Захват 14 зафиксирован от проворота относительно тележки 1 при помощи пластины. 17, закрепленной на корпусе тележки и имеющей специальное окно для захвата 14. Толкатель S и клин 11 являются фиксирующим механизмом захвата 14 относительно анкера 15. Привод подъема грузозахвата Еьтолнен в виде мотор-редуктора 18 и расположен горизонтально на корпусе г:оворотной опоры 5. На боковых стен- ь:ах поворотной опоры 5 установлены г одшипники 19, которые входят в паз
направляющих 20, закрепленных по стороны подъемного стола 6. На наружной поверхности направляющих 20 нарезана зубчатая рейка, которая находится в зацеплении с зубчатыми ненцами вала 21, получающего вращение от привода 18 через зубчатые колеса 2 и 23. I Управление устройством - программйое автоматическое, электропитание подводится через троллей (не пока- &ан)„
Устройство работает следующим об- :{ азомо
Самоходная тележка 1 с изделиями перемещается по трассе к позиции передачи груза. После точного позициони- (рования включается привод подъема стола 6 о Клин 11 поднимае.тся, освобожденный клиновой толкатель 9 под действием пружины 12 перемещает шток 8 вверх, выбирая зазор между рабочи0
5
ки поверхностями захвата 14 и анкера 15. Таким образом происходит фиксация устройства на позиции передачи груза. Достигнув заданного программой уровня,телескопический грузозах- ват 4 производит операции по передаче груза. При выносе груза за площадь опоры тележки возникает опроки- дьшающий момент.Отрьшающее усилие передается через захва г 14 и щток 8 1на клиновой толкатель 9, угол клина которого выбран из условия самоторможения. По окончании операции перегрузки подъемный стол 6 опускается в крайнее нижнее положение. При этом клин 11 преодолевает усилие пружины 12 и смещает клиновой толкатель 9. Пружина 16 выбирает образовавшийся зазор и опускает захват 14, отделяя его от анкера 15. Тележка расфиксиро- вана и может перемещаться на следующую позицию.
0
25 Формула изобретения
Устройство для транспортирования изделий, включающее тележку с катками, установленную на ней подъемно- поворотную платформу с телескопическим грузозахватом, шток с захватом, установленным с возможностью взаимодействия с анкерами, неподвижно смонтированными на позиции передачи гру
за, и фиксирующий механизм захвата, отличаю-щееся тем, что, с целью упрощения конструкции устройства, щток выполнен с пазом и связан с захватом с возможностью поворота относительно их продольной оси, а фиксирующий механизм захвата выполнен в виде клина, смонтированного на подъемной части подъемно-поворотной платформы, и подпружиненного клинового толкателя, установленного на поворотной части последней с возможностью размещения в пазу штока и взаимодействия с клином, при этом захват установлен с возможностью фиксации от поворота относительно корпуса тележки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Стеллажный кран-штабелер | 1989 |
|
SU1682299A1 |
| Мостовой кран-манипулятор | 1984 |
|
SU1194648A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1402512A1 |
| Транспортное средство с устройством для самопогрузки | 1988 |
|
SU1504126A1 |
| Устройство для перегрузки изделий | 1990 |
|
SU1773812A1 |
Изобретение относится к машиностроению и предназначено для транспортирования изделий. Цель - упрощение конструкции устройства. Для этого на тележке (Т) 1 с катками установлена подъемно-поворотная платформа с телескопическим грузозахватом. В зоне передачи изделий смонтирован анкер 15, с которым взаимодействует шток (Ш) 8 с захватом 14. В Ш 8 выполнен паз и он связан с захватом 14 с возможностью поворота относительно их продольной оси. Захват 14 фиксируется фиксирующим механизмом, выполненным в виде клина 11, смонтированного на подъемной части - столе 6 подъемно-поворотной платформы и подпружиненного пружиной 12 клинового толкателя (КТ)9. Последний смонтирован на поворотной части платформы, расположен в пазу Ш 8 и взаимодействует через ролик 10 с клином 11. Захват 14 зафиксирован от поворота относительно корпуса Т 1 в окне закрепленной на корпусе Т 1 пластины 17. После загрузки изделия Т 1 перемещается на позицию передачи груза, включается привод подъема стола 6. Клин 11 поднимается вверх и КТ 9 от пружины 12, перемещаясь, поднимает Ш 8 с захватом 14. Захват 14 замыкается на анкере 15. После передачи груза стол 6 опускается и при воздействии клина 11 на КТ 9 и смещении последнего к пружине 12 происходит опускание Ш 8 и разъединение захвата 14 и анкера 15. 6 ил.
Шигз
(pwe. J
Р едактор A. Лежнина
Фи.В
Составитель Б. Толчанов Техред Л.Олийнык Корректоре. Черни
Заказ 8060/31
Тираж 722
ВЙИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская, наб., д. 4/5
Подписное
| Авторское свидетельство СССР ,№ 412095, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для транспортирования изделий | 1985 |
|
SU1326511A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
