Изобретение относится к захватам, применяемым в сборочных автоматах, транспортных устройствах и может быть использовано в конструкциях загрузочно- разгрузочных устройств различного оборудования для передачи изделий и заготовок.
Цель изобретения - упрощение управления разжимом губок.
На чертеже изображен захват манипулятора, общий вид.
Захват содержит подпружиненные губки 1 и 2, которые смонтированы на втулке 3. На внутренней поверхности губок 1 и 2 выполнена ступенчатая полость 4, в которую фиксатор 5 имеет возможность западать. Для работы захвата как в вертикальном, так и в горизонтальном положении фиксатор 5 снабжен пружиной 6. Втулка 3 имеет возможность перемещаться совместно с губками 1 и 2 по неподвижной штанге 7, которая снабжен а копирным элементом 8. Губки 1 и 2 имеют также на внутренней поверхности
профильную поверхность 9, с помощью которой происходит раскрытие губок 1 и 2 при взаимодействии с копирным элементом 8 в момент разгрузки изделия 10. Втулка 3 в крайних положениях зафиксирована (не показано).
Захват работает следующим образом.
При подаче изделия 10 фиксатор 5 начи- .нает перемещаться по профильной поверхности губок 1 и 2 до тех пор, пока не западет в ступенчатую полость 4. В результате губки 1 и2 зажимают изделие 10. При дальнейшей подаче изделия 10 в том же направлении происходит совместное перемещение фиксатора 5 и губок 1 и 2 по цилиндрической поверхности штанги 7. При этом профильная поверхность 9 губок 1 и 2 находит на копирный элемент 8 штанги 7. Губки 1 и 2 разжимаются, пружина выталкивает в исходное положение фиксатор 5. Происходит разгрузка изделия 10. Далее цикл повторяется.
О
о ь о о VJ
Формула изобретения
Захват манипулятора, содержащий корпус, подпружиненные губки, внутренняя поверхность которых выполнена профильной, и смонтированный между губками по оси захвата подпружиненный относительно корпуса фиксатор раскрытого положения губок, отличающийся тем, что, с целью упрощения управления разжимом, корпус выполнен в виде штанги, один конец кото0
рой предназначен для крепления руки манипулятора, а на другом конце жестко закреплен привод раскрытия губок, выполненный в виде копирного элемента, имеющего возможность взаимодействия с профильной поверхностью губок, при этом губки закреплены на дополнительно введенной втулке, смонтированной на штанге с возможностью осевого перемещения, кроме того, фиксатор, копирный элемент и втулка расположены коаксиально.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1989 |
|
SU1761460A1 |
| Клещевой захват | 1985 |
|
SU1301694A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Поточная линия для изготовления модельного блока в точном литье | 1983 |
|
SU1473900A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Устройство для автоматической смены инструмента на металлорежущем станке | 1986 |
|
SU1357185A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Рука манипулятора | 1987 |
|
SU1505772A1 |
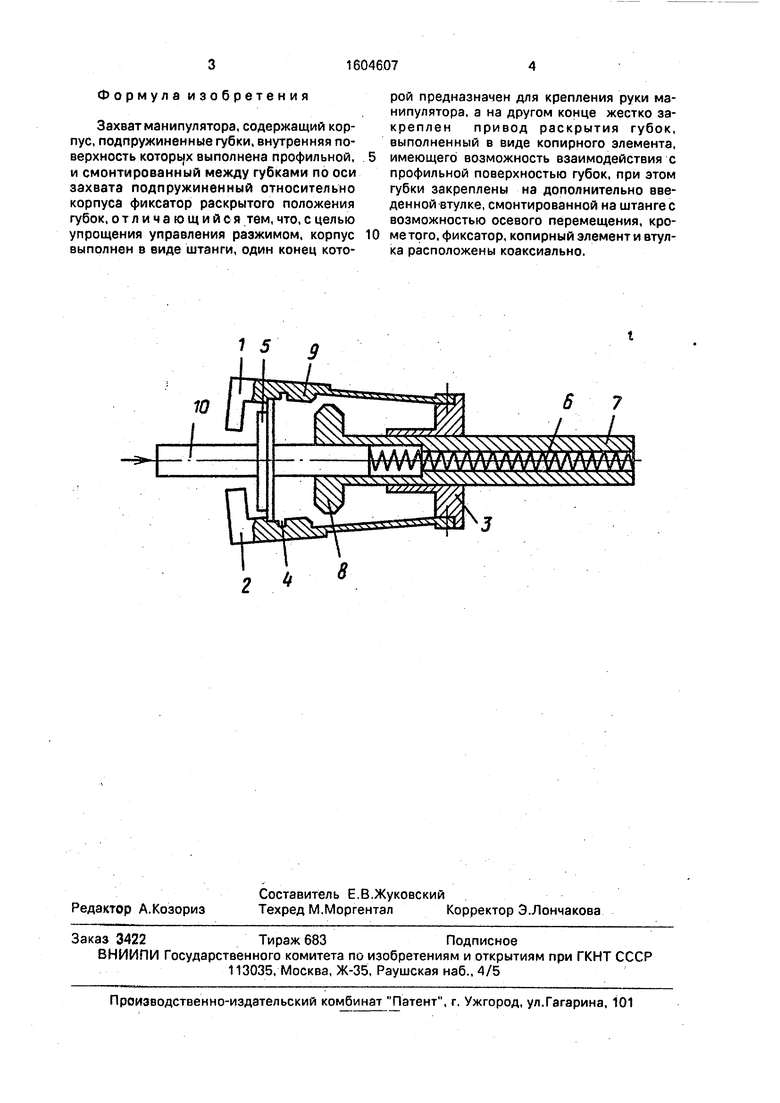
Изобретение относится к захватам, применяемым в сборочных автоматах, транспортных устройствах, и может быть использовано в конструкциях загрузочно-разгрузочных устройств различного оборудования для передачи изделий и заготовок. Цель изобретения - упрощение управления разжимом, губок. Захват манипулятора содержит корпус в виде штанги 7, один конец которой предназначен для крепления руки манипулятора, а на другом конце закреплен привод раскрытия губок, выполненный в виде копирного элемента 8. Губки 1 и 2 закреплены на подвижной относительно штанги втулке 3. При взаимодействии копирного элемента 8 с профильными поверхностями 9 губок происходит раскрытие губок 1 и 2. Фиксатор 5, копирный элемент 8 и втулка 3 расположены коаксиально. 1 ил.
1 5
| Захватное устройство | 1985 |
|
SU1341021A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
