Изобретение относится к рыбной промышленности, а именно к устройствам для подрезания пищевода и удаления жабр у крупных рыб, например дальневосточного лосося, кеты, нерки, кижуча, и может быть использовано при производстве охлажденной, копченой, соленой, пряной и вяленой рыбы.
Цель изобретения - повышение качества отделения жабр у рыбы и предотвращение ее травмирования.
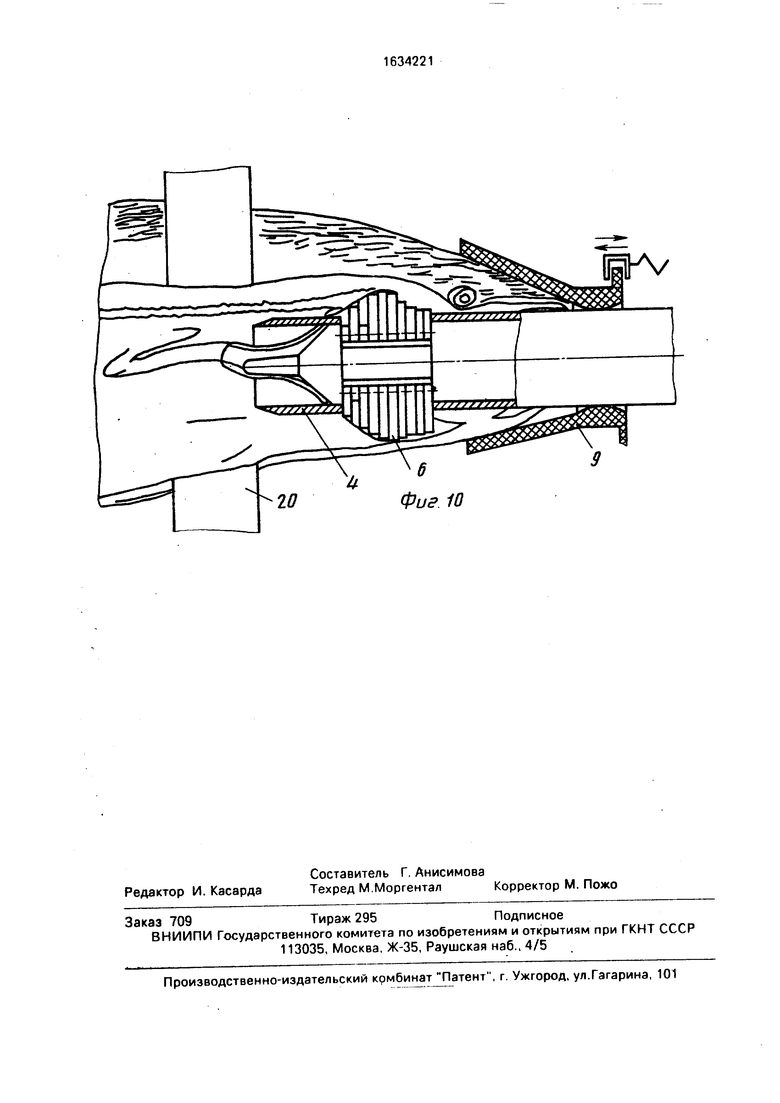
На фиг. 1 изображено устройство для подрезания пищевода и удаления жабр у рыбы, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - рабочий инструмент для подрезания пищевода и удаления жабр, общий вид (цилиндрический нож для подрезания пищевода и элементы дробления находятся в нерабочем положении, пунктиром обозначено положение рыбы в момент фиксации на цилиндрическом ноже и сьема); на фиг. 4 - вид Б на фиг. 3 (цилиндрический нож и элементы дробления рабочем положении, h - расстояние, на которое выдвигается цилиндрический нож для подрезки пищевода горбуши, 12 - расстояние, на которое выдвигается цилиндрический нож для подрезки пищевода кеты); на фиг. 5 - разрез В-В на фиг. 3 (элементы дробления жабр находятся в нерабочем положении); на фиг. 6 - разрез Г-Г на фиг. 4 (элементы дробления жабр - в рабочем положении для горбуши); на фиг. 7 - разрез Д-Д на фиг. 4 (элементы дробления жабр - в рабочем положении для кеты); на фиг. 8 - разрез Е-Е на фиг. 1; на фиг. 9 - устройство для подрезания пищевода и удаления жабр, вид сбоку (вариант исполнения ножа); на фиг. 10 - процесс подрезки пищевода и удаления жабр на сырце.
Устройство содержит укрепленный на станине 1 транспортирующий орган в виде приводного операционного ротора 2 с фиксирующими кассетами, прижимной механизм и рабочий инструмент для подрезания пищевода и удаления жабр, состоящий из вала 3, полого цилиндрического ножа 4 с симметрично расположенными окнами 5, установленного на валу 3 коаксиально с возможностью винтового перемещения вдоль него, шарнирно закрепленных на валу 3 элементов 6 дробления жабр, свободно выходящих через окна 5 ножа 4 под действием центробежной силы, и приспособления 7 для фиксации челюстей и съема рыбы.
Вал 3 установлен в корпусе 8 подшипников и имеет кольцевую проточку для закрепления приспособления 7 для фиксации челюстей и сьема рыбы и выступ 9. Свободный конец вала 3 имеет удлиненную обтекаемую форму в виде двух соосно расположенных сопряженных конусов с притупленной вершиной 10 первого. Цилиндрический нож
4имеет винтовой паз 11 для перемещения выступа 9 вала 3 и диск 12, взаимодействующий с пазом копира 13.
Режущую кромку цилиндрического ножа 4 следует выполнить заостренной под углом 5-20° для обеспечения обтекаемой формы торца вала 3 и центровки рыбы. Окна
5цилиндрического ножа 4 имеют прямоугольную форму, длина их не менее 1/2 его длины и соответствует величине глубины рта максимально обработанной рыбы
( 300 мм). Расстояние перемычки между окнами составляет до 1/10 величины периметра ножа. Кромки окон 5 по ходу вращения следует выполнить скошенными под острым углом (30°) для подрезания языка
рыбы вместе с остатками мышц жаберных дуг. С целью более полного удаления языка с остатками мышц у крупных рыб корпус ножа 4 может быть выполнен из цилиндра и усеченного конуса, меньшее основание которого соединено с цилиндром (фиг. 10).
Элементы б дробления жабр рыбы целесообразно выполнить в виде набора полуколец, шарнирно закрепленных на осях 14 в ряд, и снабдить на свободных концах
заостренными выступами 15 фигурной (клювообразной) формы. Радиус раскрытия полуколец (Ri, R2, Рз) определяется величиной перемещения (I) цилиндрического ножа 4 по валу 3 (фиг, 6-8). например, для
горбуши нож перемещается на величину И, а для кеты - 12 (фиг. 5) и соответственно R2 и RL
Приспособление 7 для фиксации челюстей и сьема рыбы следует выполнить в виде
конической втулки, коаксиально установленной на поверхности цилиндрического ножа 4 и управляемой подпружиненным копиром 16, что обеспечивает в начале цикла фиксацию челюстей рыбы (U), а в конце съем рыбы () (фиг. 4).
Каждая фиксирующая кассета выполнена в виде двуплечего рычага, свободно вращающегося вокруг оси 17, одно из которых
выполнено в виде изогнутой пластины 18 желобчатой формы для укладки рыбы на боку, а другое - в виде пластины 19, обеспечивающей выравнивание момента давления на рыбу как со стороны прижимного
механизма, так и со стороны давления пластины 18, а также автоматическую центровку размерного ряда рыбы на ось вращения. Количество инструментов для подрезания пищевода и удаления жабр соответствует числу фиксирующих кассет.
Прижимной механизм выполнен в виде двух бесконечных лент 20, направляющих роликов 21-24, где ролик 23 выполняет функцию натяжного, а ролик 22 - пружинный. Устройство содержит направляющие 25 для захвата жаберных крышек, барботер 26, приемный лоток 27 и поддон 28 для отвода жабр. Ротор 2 установлен на горизонтальной оси 29 в подшипниках 30.
Каждая направляющая 25 для захвата жабр выполнена в виде изогнутой пластины, жестко закрепленной на роторе 2 перед прижимным механизмом, обеспечивая плотную насадку рыбы на вращающийся вал 3 и фиксацию ее при подведении рыбы под прижимной механизм.
Привод ротора 2 с пониженной передачей осуществляется от мотор-редуктора через шестерню 31 на фланец 32 ротора, а привод на вал 3 каждого инструмента с обратным вращением, без понижения передаточного числа осуществляется от мотор-редуктора через шкив 33, выполняющий две функции: вентилятора обдува двигателя и передающего шкива на клиноременную передачу 34, и шкива 35 вала.
Барботер 26 выполнен в виде изогнутой по дуге трубы и установлен в рабочем секторе ротора 2 над кассетами для подачи воды и смыва отходов. Поддон 28 с рукавом 36 расположен внизу устройства и служит для удаления измельченных жабр.
Устройство работает следующим образом.
Предварительно приводится во враще- ние от мотор-редуктора через клиноременную передачу каждый инструмент (модуль для подрезания пищевода и удаления жабр с об/мин, через звездочку мотор- редуктора вращение передается на венец ротора с Vz 2,5 об/мин).
Рыба поштучно вручную или механическим средством захватывается с двух сторон в районе жаберных крышек, ориентируется головой вперед и ртом насаживается на вращающийся вал 3 до упора в пищевод. Затем рыба отводится назад для захода направляющих 25 под жаберные крышки, укладывается набок в кассету с ориентацией спинки к оси шарнира 17.
При вращении ротора 2 и синхронном перемещении инструментов и кассет рыба подпружиненными направляющими 25 смещается (поджимается) плотно на вал 3 до максимального ввода его конца в пищевод и подводится под прижимные ленты 20. Туловище рыбы фиксируется достаточно жестко между прижимными лентами 20 и эластичной пластиной 18 кассеты для обеспечения возможности переориентации рыбы и ее ориентации на симметричный подрез пищевода и качественное удаление жабр. Свободный конец пластины 19 скользит по направляющей, подпружинивая рыбу
к лентам 20.
По команде копира 16 приспособление 7 скользит по поверхности цилиндрического ножа 4 до упора в челюсти рыбы, фиксируя их с возможностью свободного перемещения
0 ножа в рот рыбы.
После завершения полной фиксации рыбы в кассете диск 12 цилиндрического ножа 4 по команде копира 13 перемещает нож на расстояние h для горбуши и на г 5 для кеты, вырезая пищевод и углубляясь в глотку на глубину, соответствующую размеру рыбы, переориентируя ее на симметричное расположение точек фиксации жабр относительно оси инструмента.
0 Диск ножа, перемещаясь по копиру 13, по винтовому пазу 11 передвигает цилиндрический нож 4 вдоль вала 3, который вырезает пищевод. Нож углубляется в рыбу на рассчитанную величину, ориентируя по5 следнюю на симметричное расположение мышц жаберных дуг относительно оси вала 3.
Из окон 5 ножа 4 поддействием центробежной силы из-под перемычки выходят
0 элементы 6 дробления, выступы 15 которых захватывают жаберные дуги и разрывают их. В местах ротовой полости, где отсутствуют жабры, элементы 6 проскальзывают, не травмируя полость.
5В зависимости от сопротивления полости элементы 6, проскальзывая, отклоняются вобратную сторону, уменьшая тем самым радиус действия.
Жабры и язык, как более рыхлые части
0 полости рта, надрываются острым выступом либо режущей кромкой. Мышцы жабр, расположенные над полостью, срезаются режущей кромкой элемента 6. Удар выступов 15 в одной и той же точке повторяют с одина5 ковой силой, поэтому их разрыв гарантирован. Полный срез мышц обеспечивается, так как частота ударов одного и того же элемента зависит от времени и скорости оборота, которые подбираются экспериментальным
0 путем. После полного удаления остатков жабр диск 12 ножа 4 согласно команде копира 13 перемещает нож 4 в исходное положение, складывая элементы в исходное положение RI посредством перекрытия их
5 перемычками окна 5. Приспособление 7 для фиксации челюст и по команде копира 16 перемещается к свободному концу ножа 4 и сбрасывает рыбу с ножа в лоток.
Согласно прилагаемой циклограмме устройства (фиг. 3) происходят следующие технологические операции при одном обороте установки.
0-90° - устройство для подрезания пищевода и удаления жабр находится в нерабочем состоянии (фиг. 6);
90-120° - выход цилиндрического ножа на заданную величину (фиг. 5);
110-120° - выход элементов дробления жабр в полости рыбы и приспособления для фиксации челюстей и съема рыбы (фиг, 4 и
5):
120-240 - процесс подрезки пищевода
и диафрагмы рыбы режущей кромкой ножа, дробление и удаление жабр рыбы заострёнными выступами клювообразной формы и элементами для дробления жабр, а также процесс фиксации челюстей рыбы (фиг, 7), мойка рыбы (фиг. 1);
240-250° - процесс возврата в исходное положение элементов дробления жабр (фиг. 4 и 6);
240-270° - процесс возврата в исходное положение цилиндрического ножа (фиг. 4);
260-280°- процесссьема рыбы приспособлением для фиксации и съема рыбы;
280-295° - процесс выстоя режущего инструмента при сьеме рыбы приспособлением для фиксации челюстей и съема рыбы;
295-330° - процесс возврата в исходное положение приспособления для фиксации и съема рыбы;
330-360° - процесс выстоя приспособления для фиксации челюстей и съема рыбы.
Предлагаемое устройство для удаления жабр и подрезания пищевода позволяет более качествено удалить жабры, и механизировать процесс обработки рыбы лососевых пород без нарушения внешнего вида и обеспечить высокую производительность удаления жабр вместе с подрезкой пищевода.
Формула изобретения 1. Устройство для подрезания пищевода и удаления жабр у рыбы, содержащее
транспортирующий орган, прижимной механизм и рабочий инструмент, включающий укрепленный на валу цилиндрический нож, приводимый в движение от копира, о т л и чающееся тем, что, с целью повышения отделения жабр у рыбы и предотвращения ее травмирования, рабочий инструмент снабжен шарнирно закрепленными на валу ножа элементами дробления жабр рыбы и
свободно посаженным на поверхность ножа приспособлением для фиксации челюстей и съема рыбы, при этом цилиндрический нож установлен на валу коаксиально с возможностью винтового перемещения вдоль
вала и имеет симметрично расположенные окна для выхода элементов дробления, а входной конец вала выполнен конусообразной формы.
2.Устройство по п. 1,отличающее- с я тем. что каждый элемент для дробления
жабр образован набором полуколец, шарнирно закрепленных одними концами и имеющих на свободных концах выступы фигурной формы с заостренными кромка- ми.
3.Устройство по п.1,отличающее- с я тем, что режущая кромка цилиндрического ножа выполнена заостренной под углом 5-20°.
4. Устройство по п. 1,отличающее- с я тем, что кромки окон ножа скошены по ходу его вращения под острым углом.
5.Устройство по п. 1,отличающее- с я тем, что приспособление для фиксации
челюстей и съема рыбы выполнено в виде конической втулки.
6.Устройство по п. 1,отличающее- с я тем, что цилиндрический нож имеет винтовой паз и диск для взаимодействия с копиром.
7.Устройство поп.1,отличающее- с я тем, что нож имеет участок, выполненный в виде усеченного конуса, соединенного меньшим основанием с цилиндрической
частью ножа.
JJ
#н/г/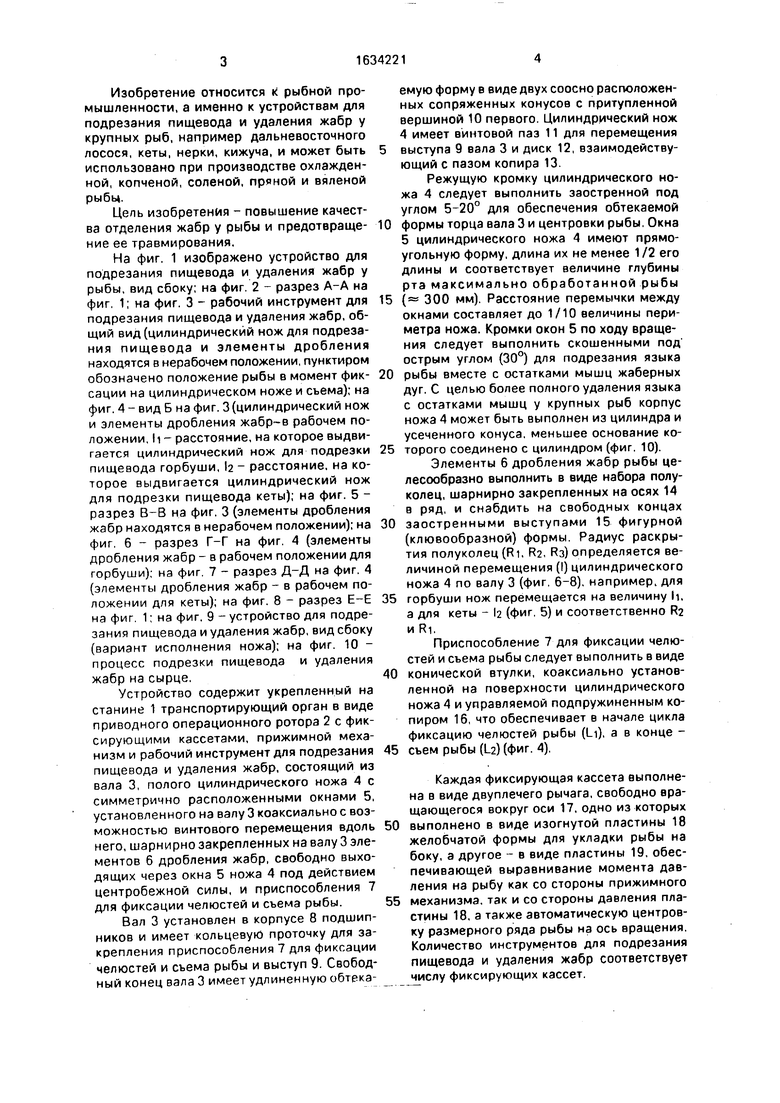
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подрезания пищевода и удаления жабр у рыбы | 1990 |
|
SU1750583A1 |
| Способ разделки голов рыб и устройство для его осуществления | 1982 |
|
SU1178387A1 |
| Устройство для удаления жабер и подрезания пищевода у рыбы | 1988 |
|
SU1711774A2 |
| МАШИНА ДЛЯ РАЗДЕЛКИ РЫБЫЙСй | 1971 |
|
SU321240A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ РЫБЫ | 1967 |
|
SU191082A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ КРУПНОЙ РЫБЫ | 1967 |
|
SU200754A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ НА БАЛЫК РЫБЫ | 1968 |
|
SU219772A1 |
| Устройство для удаления жабр и подрезания пищевода у рыбы | 1990 |
|
SU1750582A1 |
| Устройство для разделки рыбы | 1990 |
|
SU1750584A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЖАБРЕНИЯ РЫБ | 1938 |
|
SU57849A1 |


Изобретение относится к рыбной промышленности, а именно к устройствам для подрезания пищевода и удаления жабр у рыб лососевых пород. Целью изобретения является повышение предотвращения ее травмирования. Устройство состоит из ротора с набором синхронно перемещающихся вместе с рыбой по окружности рабочих инструментов для подрезания пищевода и удаления жабр и кассет, управляемых копирами, а также прижимного механизма в виде нескольких бесконечных лент, расположенных по дуге ротора, и направляющих для захвата жаберных крышек. Каждый рабочий инструмент для подрезания пищевода и удаления жабр у рыбы состоит из вала 3, установленного на нем с возможностью винтового перемещения вдоль него цилиндрического ножа 4 с симметричными окнами 5, шарнирно закрепленных на валу элементов дробления жабр, которые свободно выходят через окна 5 ножа под действием центробежной силы. На поверхности ножа 4 расположено свободно перемещающееся приспособление 7 для фиксации челюстей и сьема рыбы. Нож 4 кинематически связан с копиром 13, определяющим перемещение его вдоль вала. 6 з.п. ф-лы, 10 ил. сл с о CJ го ю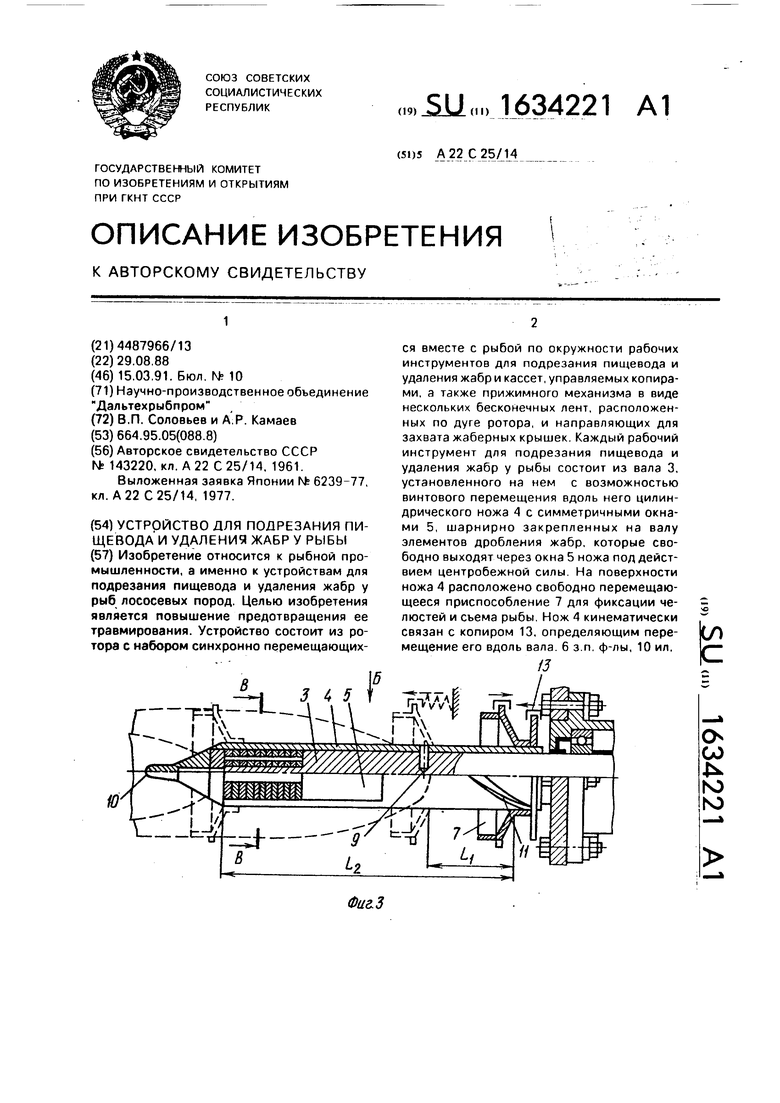
31
П
Видб
4
4i
22
Фиг. 10
| Устройство для отсасывания содержимого преимущественно из пищевода рыб | 1961 |
|
SU143220A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Судно | 1925 |
|
SU1961A1 |
| Устройство для обработки металлов путем штампования, резания и т.п. | 1927 |
|
SU6239A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
