Ё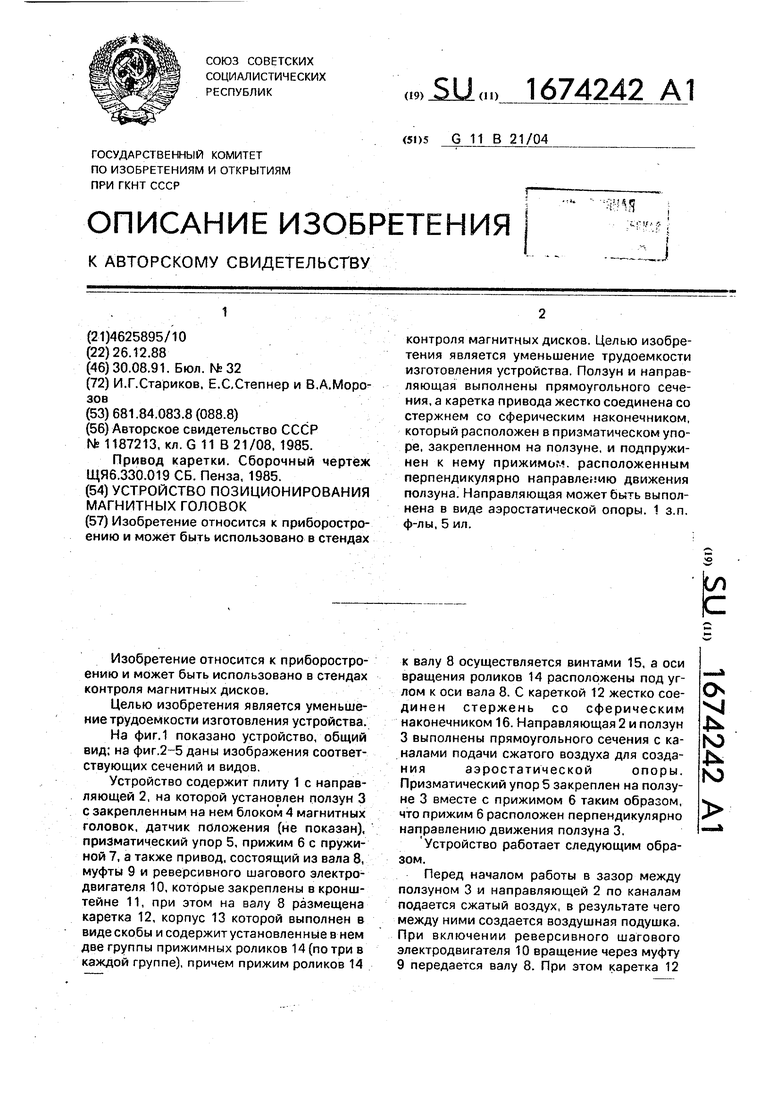
| название | год | авторы | номер документа |
|---|---|---|---|
| Пильно-обрабатывающее устройство для обработки пластикового профиля | 2019 |
|
RU2710702C1 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Установка для изготовления теплоизоляционных минераловатных изделий с вертикальной слоистостью | 1982 |
|
SU1043136A1 |
| ЛЕНТОШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ПРОФИЛЕЙ В ЗОНЕ СВАРНЫХ СТЫКОВ | 1966 |
|
SU216466A1 |
| Станок для крепления лицевой стенки выдвижного ящика мебели | 1983 |
|
SU1123853A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Цепевязальный автомат с кантователем вертикального исполнения | 1986 |
|
SU1383571A1 |
| Установка для разборки гусеничных лент | 1988 |
|
SU1585104A1 |
| УСТРОЙСТВО ДЛЯ ПЕРФОРИРОВАНИЯ ТОНКОЙ МЕТАЛЛИЧЕСКОЙ ЛЕНТЫ | 2012 |
|
RU2500497C1 |
Изобретение относится к приборостроению и может быть использовано в стендах контроля магнитных дисков. Целью изобретения является уменьшение трудоемкости изготовления устройства. Ползун и направляющая выполнены прямоугольного сечения, а каретка привода жестко соединена со стержнем со сферическим наконечником, который расположен в призматическом упоре, закрепленном на ползуне, и подпружинен к нему прижимом, расположенным перпендикулярно направлению движения ползуна. Направляющая может быть выполнена в виде аэростатической опоры. 1 з.п. ф-лы, 5 ил.
Изобретение относится к приборостроению и может быть использовано в стендах контроля магнитных дисков.
Целью изобретения является уменьшение трудоемкости изготовления устройства.
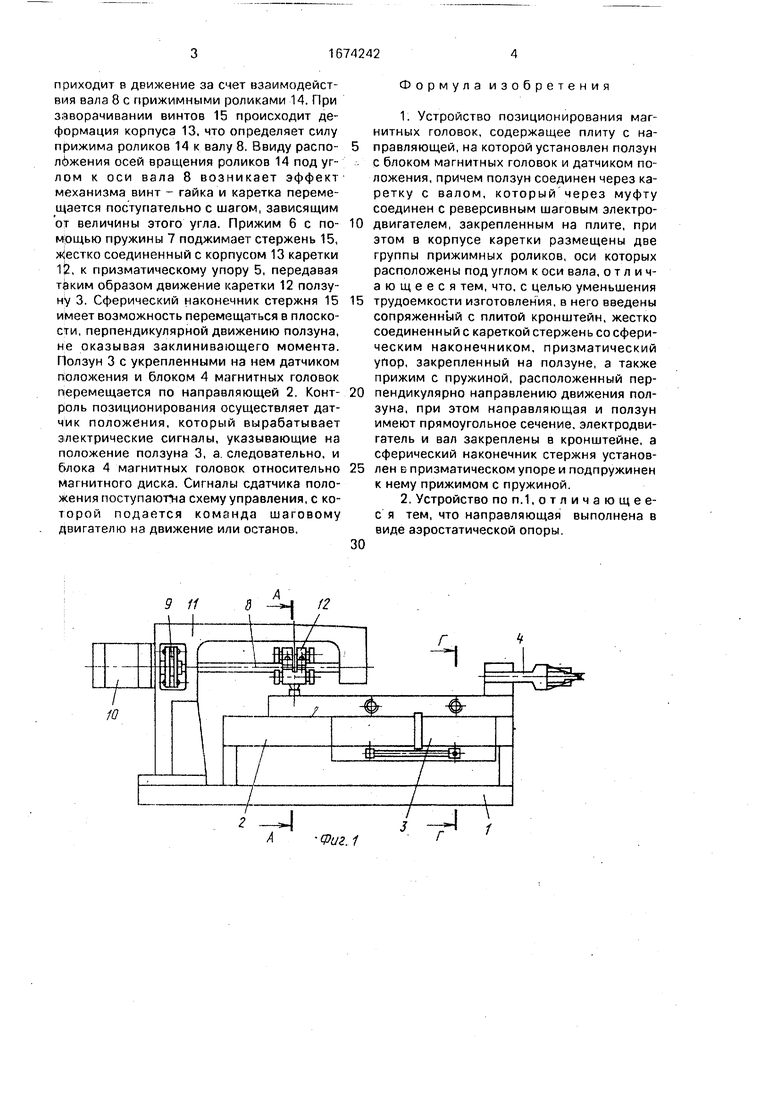
На фиг.1 показано устройство, общий вид; на фиг.2-5 даны изображения соответствующих сечений и видов.
Устройство содержит плиту 1 с направляющей 2, на которой установлен ползун 3 с закрепленным на нем блоком 4 магнитных головок, датчик положения (не показан), призматический упор 5, прижим 6 с пружиной 7, а также привод, состоящий из вала 8, муфты 9 и реверсивного шагового электродвигателя 10, которые закреплены в кронштейне 11, при этом на валу 8 размещена каретка 12, корпус 13 которой выполнен в виде скобы и содержит установленные в нем две группы прижимных роликов 14 (по три в каждой группе), причем прижим роликов 14
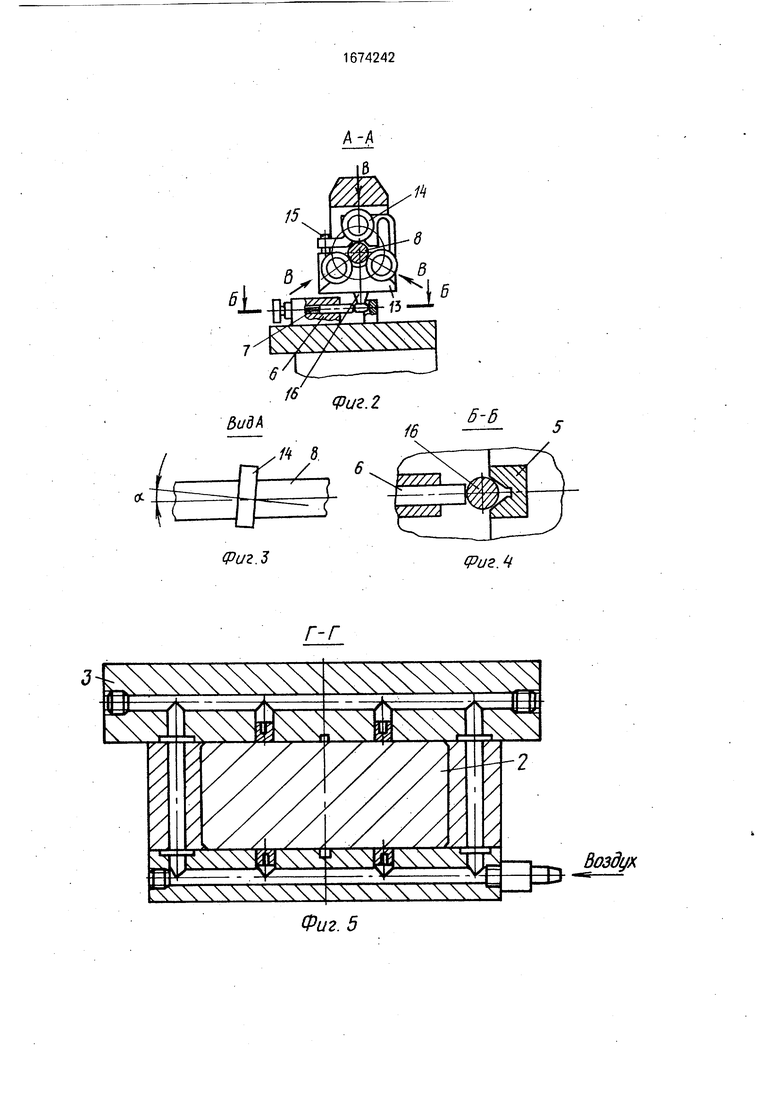
к валу 8 осуществляется винтами 15, а оси вращения роликов 14 расположены под углом к оси вала 8. С кареткой 12 жестко соединен стержень со сферическим наконечником 16. Направляющая 2 и ползун 3 выполнены прямоугольного сечения с каналами подачи сжатого воздуха для созданияаэростатическойопорыПризматический упор 5 закреплен на ползуне 3 вместе с прижимом 6 таким образом, что прижим 6 расположен перпендикулярно направлению движения ползуна 3.
Устройство работает следующим образом.
Перед началом работы в зазор между ползуном 3 и направляющей 2 по каналам подается сжатый воздух, в результате чего между ними создается воздушная подушка. При включении реверсивного шагового электродвигателя 10 вращение через муфту 9 передается валу 8. При этом каретка 12
О
VI hO Јь ГО
приходит в движение за счет взаимодействия вала 8 с прижимными роликами 14, При заворачивании винтов 15 происходит деформация корпуса 13, что определяет силу прижима роликов 14 к валу 8. Ввиду расположения осей вращения роликов 14 под углом к оси вала 8 возникает эффект механизма винт - гайка и каретка перемещается поступательно с шагом, зависящим от величины этого угла. Прижим 6 с помощью пружины 7 поджимает стержень 15, жестко соединенный с корпусом 13 каретки 12, к призматическому упору 5, передавая таким образом движение каретки 12 ползуну 3. Сферический наконечник стержня 15 имеет возможность перемещаться в плоскости, перпендикулярной движению ползуна, не оказывая заклинивающего момента. Ползун 3 с укрепленными на нем датчиком положения и блоком 4 магнитных головок перемещается по направляющей 2. Контроль позиционирования осуществляет датчик положения, который вырабатывает электрические сигналы, указывающие на положение ползуна 3, а следовательно, и блока 4 магнитных головок относительно магнитного диска. Сигналы сдатчика положения поступаютна схему управления, с которой подается команда шаговому двигателю на движение или останов.
Фиг. 1
Формула изобретения
трудоемкости изготовления, в него введены сопряженный с плитой кронштейн, жестко соединенный с кареткой стержень со сферическим наконечником, призматический упор, закрепленный на ползуне, а также прижим с пружиной, расположенный перпендикулярно направлению движения ползуна, при этом направляющая и ползун имеют прямоугольное сечение, электродвигатель и вал закреплены в кронштейне, а сферический наконечник стержня установлен Е- призматическом упоре и подпружинен к нему прижимом с пружиной.
1 J
3 -г
yfigeog
Ь гпсЬ
9-ff
Ј гпф
| Устройство для перемещения магнитных головок | 1984 |
|
SU1187213A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Привод каретки | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Пенза, 1985 | |||
