Наиболее близким по технической сущности и достигаемому результату является устройство, включающее датчик положения, сочлененный с управляемым механизмом, сумматор, суммирующий сигнал задания и сигнал с датчика положения, причем сигнал рассогласования с выхода сумматора поступает на вход регулятора положения, соединенный через регуляторы скорости и тока с тиристорным преобразователем, от которого получает питание двигатель, сочлененный с управляемым механизмом.
Недостатком данного устройства является наличие люфтов между датчиком положения и механизмом, если датчик положения сочленяется не непосредственно с механизмом, а например, с промежуточной шестерней редуктора управляемого механизма (нажимного винта). Непосредственное сочленение датчика положения с уп- равляемым механизмом, положение которого необходимо измерять, является сложным и ненадежным, так как представляет собой механическое устройство, преобразующее вращательно-поступательное движение нажимного винта во вращательное движение датчика положения. В то же время сочленение датчика положения с промежуточной шестерней редуктора управляемого механизма (нажимного винта), которая только вращается и не совершает поступательного движения, проще и надежнее, но люфты в передаче между датчиком положения и управляемым механизмом влияют на точность установки нажимных винтов и качество переходного процесса.
Целью изобретения является повышение точности позиционирования управляемых механизмов (нажимных винтов) в заданное положение за счет учета люфтов в механической передаче между датчиком положения и перемещаемым механизмом путем ввода в блок суммирования дополнительного сигнала коррекции, соответствующего величине люфта, при реверсе сигнала задания или при перерегулировании.
Предлагаемое устройство для автоматической настройки прокатной клети включает регулятор положения, регуляторы скорости и тока, тиристррный преобразователь, блок суммирования, блок задания, датчик положения и дополнительно содержит пять запоминающих устройств, два сумматора, два компаратора, два ключа, два логических элемента И, логический элемент ИЛИ, инвертор, блок задания коррекции, блок зоны нечувствительности, автоматическое устройство и блок управления.
Первый выход блока управления соединен с первыми входами первого и второго запоминающих устройств, второй выход - с вторыми входами первого и второго запоминающих устройств, первым входом третьего запоминающего устройства и входом блока задания. Третий выход блока управления соединен с вторым входом третьего запоминающего устройства и первым входом логи0 ческого элемента ИЛИ, второй вход которого соединен с первым выходом автоматического устройства. Второй выход автоматического устройства соединен с первым входом первого сумматора, второй вход ко5 торого соединен с входом третьего запоминающего устройства и с выходом второго сумматора. Первый вход второго сумматора соединен- с выходом блока задания, а второй вход - с выходом третьего запоминаю0 щего устройства. Третий вход первого сумматора соединен с выходом второго запоминающего устройства, третий вход которого соединен с выходом датчика положения и первым входом третьего сум5 матора, второй вход которого соединен с выходом первого сумматора, а третий и четвертый входы - с выходами первого и второго ключа. Выход третьего сумматора соединен с входом блока зоны нечувстви0 тельности, выход которого соединен с первым входом регулятора положения и входами первого и второго компараторов, выход которого соединен с одним из входов . четвертого и пятого запоминающих уст5 ройств, другие входы которых, а также третий вход первого запоминающего устройства соединены с выходом первого компаратора. Выход первого запоминающего устройства соединен с первым входом
0 первого логического элемента И и через инвертор с первым входом второго логического элемента И, второй вход первого логического элемента И соединен с выходом пятого запоминающего устройства, а
5 второй вход второго логического элемента И соединен с выходом четвертого запоминающего устройства. Выход первого логиче- ского элемента И соединен с одним из входов первого ключа, другой вход которого
0 соединен с выходом блока задания коррекции и с одним из входов второго ключа, другой вход которого соединен с выходом второго логического элемента И. Выход ло-. , гического элемента ИЛИ соединен с вторым
5 входом регулятора положения.
Перед прокаткой одним из способов определяется люфт между перемещением нажимного винта и перемещением датчика положения, величина которого вводится и запоминается в блоке задания коррекции.
При изменении знака сигнала задания или при перерегулировании сигнал коррекции, соответствующий величине люфта, суммируется с сигналом задания и тем самым обеспечивается точная отработка задания на перемещение нажимного винта.
Необходимость этого вызвана тем, что при реверсе сигнала задания нажимной винт будет перемещаться в противоположном предыдущему перемещению направлении. При изменении направления перемещения нажимного винта будут раскрываться зазоры в сочленениях между шестернями редуктора нажимного устройства, нажимной винт при этом трогается позже, чем двигатель нажимного устройства на время раскрытия зазоров. Если датчик по- ложения сочленен с промежуточной шестерней редуктора или с валом двигателя, то вал датчика начнет вращаться раньше, чем нажимной винт, который тронется с места после выбирки пюфта. При малых сигналах задания на перемещение нажимного винта (порядка 0,1 ...0,2 мм) они соизмеримы с величиной люфта между датчиком положения и нажимным винтом. Это приводит к тому, что при отработке сигнала задания датчик положения будет вращаться и компенсировать сигнал задания, а нажимной винт будет стоять на месте. При больших сигналах задания будет иметь место погрешность в установке нажимного пинта в требуемое положение при реверсе сигнала задания.
Чтобы избежать этого, необходимо сигнал задания увеличить на величину люфта. Но так как перемещение нажимного винт осуществляется как в одну, так. и в другую сторону, то коррекция сигнала задания должна иметь разный знак, а именно знак коррекции должен совпадать со знаком, сигнала задания.
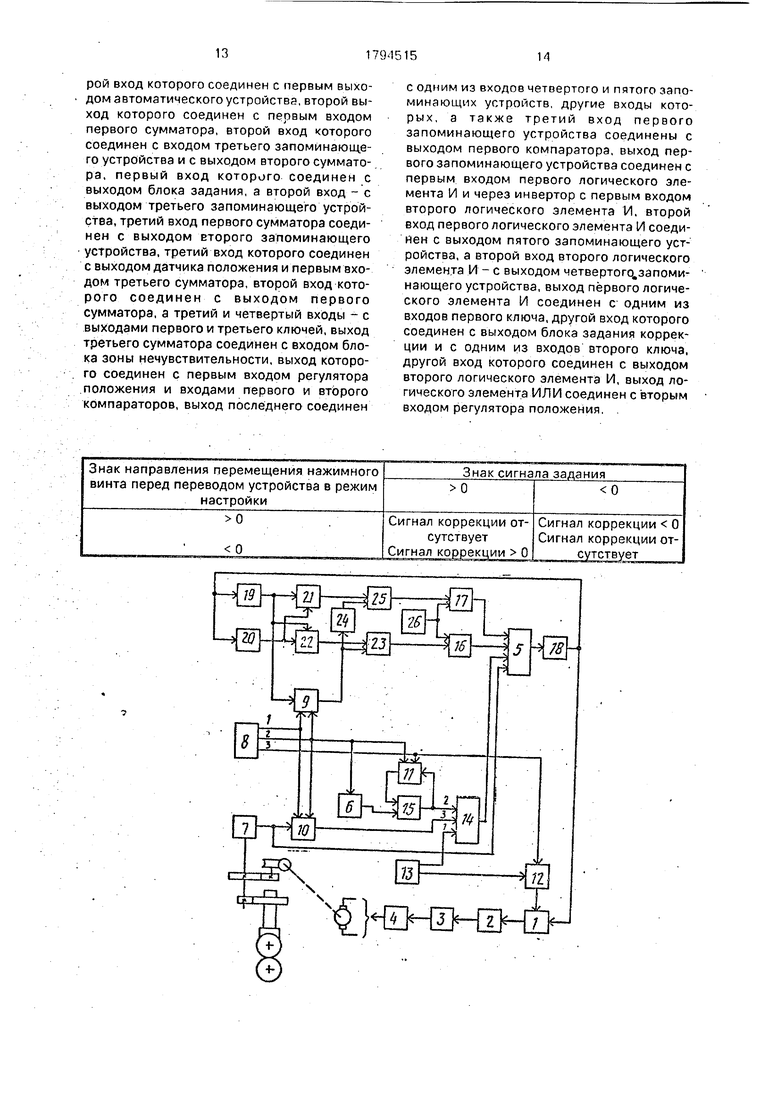
Знак сигнала коррекции и его необходимость определяются в соответствии с таблицей в зависимости от направления перемещения нажимного винта перед переводом устройства в режим настройки и от знака сигнала задания.
Условия формирования сигнала коррекции приведены в таблице.
Если знак направления последнего перед переключением в режим настройки перемещения нажимного винта меньше ноля, а сигнал задания на перемещение больше ноля, то знак сигнала коррекции учета люфа должен быть положительным. Если сигнал задания на перемещение меньше нуля, о коррекция учета люфта отсутствует, так как перемещение нажимного винта будет существляться в том же самом направлении, реверс отсутствует и зазоры раскрываться не будут.
Если знак направления последнего перед переключением в режим настройки пе- 5 ремещения нажимного винта был больше ноля, а сигнал задания на перемещение меньше ноля, то знак сигнала коррекции учета люфта должен быть отрицательным. Если сигнал задания на перемещение боль0 ше ноля, то коррекция учета люфта отсутствует.
На чертеже изображена функциональная схема устройства.
Устройство для автоматической на5 стройки прокатной клети состоит из регулятора 1 положения, регуляторов 2 и 3 скорости и тока, тиристорного преобразователя 4, сумматора 5, блока б задания, датчика 7 положения, блока 8 управления, первый
0 выход которого соединен с первыми входами первого 9 и второго 10 запоминающих устройств, второй выход блока 8 управления соединен с вторыми входами первого 9 и второго 10 запоминающих устройств, пер5 вым входом третьего 11 запоминающего устройства и входом блока 6 задания,третий выход блока 8 управления соединен с вторым входом третьего 11 запоминающего устройства и первым входом логического
0 элемента 12 ИЛИ, второй вход которого соединен с первым выходом автоматического устройства 13, второй выход которого соединен с первым входом первого 14 сумма- тора, второй вход которого соединен с
5 входом третьего 11 запоминающего устройства и выходом второго 15 сумматора, первый вход которого соединен с выходом блока 6 задания, а второй вход - с выходом третьего 11 запоминающего устройства,
0 третий вход первого 14 сумматора соединен с выходом второго 10 запоминающего устройства, третий вход которого соединен с выходом датчика 7 положения и первым входом 5 сумматора, второй вход которого сое5 динен с выходом первого 14 сумматора, а третий и четвертый входы - с выходами первого 16 и второго 17 ключей, выход сумматора 5 соединен с входом блока 18 зоны нечувствительности, выход которого соеди- . 0 нен с первым входом регулятора 1 положения и входами первого 19 и второго 20 компаратора, выход второго 20 компаратора соединен с. одним из входов четвертого 21 и пятого 22 запоминающих устройств,
5 другие сходы которых, а также третий вход первого 9 запоминающего устройства соединен с выходом первого 16 компаратора, выход первого 9 запоминающего устройства соединен с первым входом первого 23 логического элемента И и через инвертор 24
с первым входом второго 25 логического элемента И, второй вход первого 23 логического элемента И соединен с выходом пятого 22 запоминающего устройства, а второй вход второго 25 логического элемента И соединен с выходом четвертого 21 запоминающего устройства, выход первого 23 логического элемента И соединен с одним из входов 16 первого ключа, другой вход которого соединен с выходом блока 25 задания коррекции и с одним из входов второго 17 ключа, другой вход которого соединен с выходом второго 25 логического элемента И, выход логического элемента 12 ИЛИ соединен с вторым входом регулятора 1 положения.
В блоке 6 задания оператором формируется сигнал задания на перемещение нажимных винтов в приращениях к установленному после перевалки валков положению нажимных винтов, например +0,1 мм, -0,2 мм.
Второй 15 сумматор предназначен для сложения сигналов задания на перемещение нажимных винтов и получения суммарного значения коррекции положения нажимных винтов, которое запоминается в третьем 11 запоминающем устройстве. Запоминание осуществляется при формировании блоком 8 управления сигнала на отработку задания на перемещение.
Первый 14 сумматор обеспечивает сложение сигнала задания на перемещение нажимного винта, сформированного в приращениях, со значением установленного после перевалки положения нажимного винта, измеренного датчиком 7. положения и запомненного во втором 10 запоминающем устройстве. Запоминание осуществляется по сигналу с выхода блока 8 управления в момент перевода устройства из режима контроля в режим настройки клети.
Блок 8 управления обеспечивает формирование оператором логических сигналов- управления в блоки устройства с помощью коммутационной аппаратуры. Он формирует сигналы во второе 10 запоминающее устройство для запоминания положения нажимного винта и в первое 9 запоминающее устройство для запоминания направления перемещения нажимного винта перед переключением устройства в режим настройки, а также сигнал разрешения на отработку задания в регулятор 1 положения и на запоминание в третье 11 запоминающее устройство, сигнал сброса во второе 10 и третье 11 запоминающие устройства, блок 6 задания, первое 9 запоминающее устройство.
Автоматическое устройство 13 формирует сигнал задания на перемещение нажимных винтов и логических сигнал на управление регулятором 1 положения в автематическом режиме по сигналам от измерителей технологических параметров. Например, автоматическое устройство может контролировать температуру раската на входе в клеть, формировать сигнал управления на перемещение нажимных винтов с целью, компенсации влияния температуры на толщину проката по алгоритму AS К Д$, где К- коэффициент передачи, определяемый экспериментально и уточняемый
в ходе прокатки,
Сумматор 5 суммирует сигналы задания, сигнал обратной связи с датчика 7 положения нажимных винтов и сигнал коррекции с блока 26 задания коррекции с
положительным или отрицательным знаком в зависимости от знака сигнала задания и знака последнего перемещения нажимного винта перед переключением устройства в режим настройки.
Компараторы 19 и 20 определяют направление перемещения нажимных винтов в режиме подготовки устройства и полярность сигнала задания, т.е. направление перемещения в соответствии с сигналом
рассогласования на выходе сумматора 5.
Компаратор 19 формирует на своем выходе логический сигнал 1, если сигнал рассогласования Ј больше положительного значения зоны нечувствительности :
К1 1, К2 о, если к Д.
Компаратор 20 формирует на своем выходе логический сигнал 1, если сигнал рассогласования больше отрицательного, значения зоны нечувствительности:
К1 0, К2 1,если Ј А.
Четвертое 21 и пятое 22 запоминающие устройства запоминают значения на выходе компараторов 19 и 2, на период отработки сигналов задания.
Первое 9 запоминающее устройство запоминает направление перемещения нажимных винтов перед переводом устройст- ва в режим настройки и сохраняет это значение в течение всего времени работы
доследующей перевалки валков.
Устройство работает следующим образом.
Первый режим - режим контроля за направлением перемещения нажимного винта
во время перевалки клети. Второй режим - режим настройки клети от блока 6 задания или от автоматического устройства 13.
При переходе в режим контроля блок 8 управления формирует на втором выходе
сигнал сброса в первое 9. второе 10 и третье 11 запоминающее устройства, в блок 6 задания перемещения и тем самым сбрасывает их в ноль.
В режиме контроля сигнал рассогласования на выходе сумматора 5 определяется сигналом с датчика 7 положения нажимного винта. Полярность сигнала рассогласования при этом будет соответствовать направлению перемещения нажимного винта. Сигнал рассогласования поступает через блок 18 зоны нечувствительности на входы первого 19 и второго 20 компараторов,, В зависимости от полярности сигнала срабатывает один из них. При поступлении сигнала положительной полярности и превышающего значения зоны нечувствительности на выходе компаратора 19 появляется логический сигнал 1, на выходе компаратора 20 - логический сигнал 0. Логический сигнал 1 с выхода компаратора 19 поступает на вход установки четвертого 21 запоминающего устройства и одновременно на вход сброса пятого 22 запоминающего устройства. Логический сигнал 0 с выхода компаратора.20 поступает на вход установки пятого 22 запоминающего устройства и на вход сброса четвертого 21 запоминающего устройства. Таким образом на выходе четвертого 21 запоминающего устройства устанавливается логическая 1, на входе пятого 22 запоминающего устройства устанавливается логический 0. Сигнал логической 1 с выхода четвертого 21 запоминающего устройства поступает на вход второго 25 логического элемента И, а логический ноль О выхода пятого 22 запоминающего устройства поступает на вход первого 23 логического элемента И. Тем самым определяется знак сигнала коррекции люфта и момент его ввода, При отрицательном сигнале рассогласования, схема будет работать аналогичным образом, но сигнал логической 1 установится на выходе пятою 22 запоминающего устройства, а на выходе четвертого 21 запоминающего устройства установится логический 0.
Одновременно с выхода компаратора 19 логический сигнал 1 или 0 в зависимости от направления вращения нажимного винта поступает на вход первого 9 запоминающего устройства, но запоминание сигнала не производится.
После окончания перевалки оператор с помощью блока 8 управления переводит устройство из режима контроля в режим настройки. При этом осуществляется запоминание вторым 10 запоминающим устройством значения датчика 7 положения, суммирование его в первом 14 сумматоре с
нулевым сигналом задания, суммирование в сумматоре 5 сигнала с выхода первого 14 сумматора с сигналом датчика 7 положения и компенсация его, суммирование с сигна- 5 лом коррекции люфта. После этого сигнал рассогласования на выходе сумматора 5 будет определяться сигналом коррекции люфта.
Одновременно первое 9 запоминающее
0 устройство запоминает устройство запоминает логический сигнал с выхода первого 19 компаратора, который будет определять направление последнего перемещения нажимного винта перед переводом устройства
5 в режим настройки.
После запоминания сигнала с выхода первого 19 компаратора первое 9 запоминающее устройство определяет знак сигнала коррекции люфта. Если направление пере0 мещения нажимного винта положительное, то на выходе первого 9 запоминающего устройства запоминается логический сигнал 1, который поступает на вход первого 23 логического элемента И, на вход второго 25
5 логического элемента И через инвертор 24 поступает логический сигнал 0. Второй 17 ключ блокируется, а первый 16 ключ подготавливается к работе и тем самым задается отрицательный знак сигнала коррекции
0 люфта.
Если направление перемещения нажимного винта отрицательное, то на выходе первого 9 запоминающего устройства запоминается логический сигнал 0, через первым
5 -23 логический элемент И блокируется первый 16 ключ, а второй 17 ключ через инвертор 24 и второй 25 логический элемент И подготавливается к работе и тем самым задается положительный знак сигнала коррек0 ции люфта.
Дальнейшая работа определяется формированием сигнала задания на перемещение блоком 6 задания.
Когда перемещение нажимного винта
5 положительное, знак коррекции люфта будет отрицательный. При первом формировании положительного сигнала задания блоком 6 задания перемещения он суммируется во втором 15 сумматоре с нулевым сиг0 налом третьего 11 запоминающего устройства, далее суммируется в первом 14 сумматоре с запомненным значением сигнала с датчика 7 положения. На выходе первого 14 сумматора формируется сигнал на
5 перемещение нажимного винта не в приращениях, а в абсолютных значениях положения нажимного винта, который поступает на вход сумматора 5. В сумматоре 5 он суммируется с сигналом обратной связи датчика 7 положения. Сигнал рассогласования с выхода сумматора 5 через блок 18 зоны нечувствительности поступает на вход регулятора 1 положения и входы компараторов 19 и 20. При положительном сигнале задания и рассогласования на выходе четвертого 21 запоминающего устройства будет логический сигнал 1, на выходе пятого 22 запоминающего устройства - логический сигнал 0. Ука- занные сигналы поступают на входы первого 23 и второго 25 логических элементов И соответственно, в результате чего на их входах с учетом сигналов первого 9 запоминающего устройства и инвертора 24 присутствуют разноименные логические сигналы, на входах элементов логические сигналы 0, ключи 16 и 17 будут закрыты и сигнал коррекции люфта вводиться не будет.
При первом формировании отрицательного сигнала задания на выходе четвертого 21 запоминающего устройства будет логический сигнал 0, а на выходе пятого 22 запоминающего устройства -логический сигнал 1. На обоих входах первого 23 логического элемента Л будут присутствовать логические сигналы 1, на его выходе появится также логический сигнал 1, который откроет первый 16 ключ, и на вход сумматора 5 поступит сигнал коррекции отрицательной полярности,
В случае, если перемещение нажимного винта было отрицательным, то при первом сигнале задания положительной полярности устройством будет сформирован сигнал коррекции люфта положительной полярности. При первом сигнале задания отрицательной полярности сигнал коррекции люфта будет отсутствовать. Таким образом устройство формирует или не формирует
сигнал коррекции люфта соответствующей полярности.
После формирования сигнала задания на перемещение нажимного винта с учетом
сигнала коррекции люфта оператор с помощью блока управления формирует сигнал разрешения отработки, который через логический элемент 12 ИЛИ поступает на вход разрешения регулятора 1 положения. Регулятор 1 положения формирует сигнал задания в регулятор 2 скорости, который управляет перемещением с помощью двигателя нажимного устройства (нажимного винта). Датчик 7 положения нажимного винта при его вращении изменяет сигнал на выходе таким образом, что он компенсирует сигнал задания. Перемещение нажимного винта продолжается до тех пор, пока сигнал рассогласования на выходе сумматора 5 не
станет меньше зоны нечувствительности, На выходе блока 18 зоны нечувствительности появится сигнал, равный 0, и двигатель нажимных винтов остановится.
На входах компараторов 19 и 20 установится нулевой сигнал рассогласования, на выходах компараторов установятся логические сигналы 0, при этом состояние четвертого 21 и пятого 22 . запоминающих устройств не изменится до формирования
следующего сигнала задания.
В случае нерегулирования, которое может возникнуть при отработке больших заданий на перемещение, работа устройства аналогична работе при изменении полярности сигнала задания.
Таким образом,устройство обеспечивает автоматическое управление положением нажимных винтов с коррекцией величины люфта между нажимным винтом и датчиком
его,положения,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования формы полосы при непрерывной прокатке | 1990 |
|
SU1685566A1 |
| Устройство для регулирования формы полосы в процессе непрерывной прокатки | 1990 |
|
SU1729644A1 |
| Устройство для регулирования относительного обжатия | 1981 |
|
SU992108A1 |
| Устройство для автоматического управления процессом дегидрирования углеводородов | 1987 |
|
SU1414842A1 |
| Устройство для управления нажимнымиВиНТАМи | 1979 |
|
SU829235A1 |
| Устройство регулирования натяжения полосы | 1981 |
|
SU939150A1 |
| Устройство автоматической коррекции толщины полосы стана горячей прокатки | 1978 |
|
SU774645A1 |
| Устройство для регулирования относительного обжатия | 1983 |
|
SU1119749A2 |
| Устройство для задания уставкиНАТяжЕНия пОлОСы | 1979 |
|
SU814501A1 |
| Устройство для регулирования толщины полосы на входе непрерывного прокатного стана | 1979 |
|
SU900903A1 |
Использование: прокатные клети, устранение влияния люфтов. Сущность изобретения: регулятор положения, регуляторы скорости и тока, тиристорный преобразователь, три сумматора, блок задания, датчик положения, пять запоминающих устройств, два компаратора, два ключа, два логических элементов И, логический элемент ИЛИ, инвертор, блок задания коррекции, блок зоны нечувствительности, автоматическое устройство и блок управления. 1 табл., 1 ил. Однако необходимая установка дополнительных редукторов и двигателей не всегда возможна на существующих клетях прокатных станов. Известное устройство, исключающее люфты в трансмиссии за счет того, что во всех случаях позиционирование механизма в заданное положение производится со стороны, противоположной силовым воздействиям на механизм, обладает недостаточным быстродействием, ю Јь ел СП
Фор мула изобретения Устройство для автоматической настройки прокатной клети, включающее регулятор положения, регуляторы скорости и тока, тиристорный преобразователь, блок суммирования блок задания, датчик положения, отличающееся тем, что, с целью повышения точности настройки клети за счет учета люфтов в механической передаче между перемещаемым механизмом и датчиком его положения, оно снабжено пятью запоминающими устройствами, двумя сумматорами, двумя компараторами, двумя ключами, двумя логическими элементами И, логическим элементом ИЛИ, инвертором, блоком задания коррекции, блоком зоны нечувствительности, автоматическим устройством и блоком управления, первый выход которого соединен с первыми входами первого и второго запоминающих устройств, второй выход блока управления соединен с вторыми входами первого и второго запоминающих устройств, первым входом третьего запоминающего устройства и входом блока задания, третий выход блока управления соединен с вторым входом третьего запоминающего устройства и первым входом логического элемента ИЛИ, второй вход которого соединен с первым выходом автоматического устройства,второй выход которого соединен с первым входом первого сумматора, второй вход которого соединен с входом третьего запоминающего устройства и с выходом второго сумматора, первый вход которого соединен с выходом блока задания, а второй вход - с выходом третьего запоминающего устройства, третий вход первого сумматора соединен с выходом второго запоминающего устройства, третий вход которого соединен с выходом датчика положения и первым входом третьего сумматора, второй вход которого соединен с выходом первого сумматора, а третий и четвертый входы - с выходами первого и третьего ключей, выход третьего сумматора соединен с входом блока зоны нечувствительности, выход которого соединен с первым входом регулятора .положения и входами первого и второго компараторов, выход последнего соединен
с одним из входов четвертого и пятого запоминающих устройств, другие входы которых, а также третий вход первого запоминающего устройства соединены с выходом первого компаратора, выход первого запоминающего устройства соединен с первым входом первого логического элемента И и через инвертор с первым входом второго логического элемента И, второй вход первого логического элемента И соединен с выходом пятого запоминающего устройства, а второй вход второго логического элемента И - с выходом четвертого.запоми- нающего устройства, выход первого логического элемента И соединен с одним из входов первого ключа, другой вход которого соединен с выходом блока задания коррекции и с одним из входов второго ключа, другой вход которого соединен с выходом второго логического элемента И, выход логического элемента ИЛИ соединен с вторым входом регулятора положения, .
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Тэцу то хаганэ, 1987, т | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Саморазгружающаяся платформа | 1922 |
|
SU385A1 |
| Способ управления скоростным режимом чистовой группы клетей непрерывного широкополосного стана | 1978 |
|
SU718192A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ | 0 |
|
SU360122A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Цифро-аналоговая система управления положением механизмов | 1981 |
|
SU1005968A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Слежановский О.В | |||
| и др | |||
| Устройство унифицированной блочной системы регулирования дискретного типа (УБСР), М.: Энергия, 1975, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Изобретение относится к автоматизации металлургического производства и может быть использовано для управления положением механизмов прокатных станов | |||
| Известно устройство, обеспечивающее выборку люфтов в элементах редукторов и их | |||
| связях с нажимными винтами за счет установки вспомогательных электродвигателей, например, постоянного тока, сочлененных с валами этих редукторов и создающих предварительный натяг в зубьях передачи редукторов. | |||
