Область техники
Настоящее изобретение относится к управлению положением выгрузки драглайна и разработано, в частности, но не исключительно, для управления положением выгрузки для драглайна, использующего дифференциальное управление подъемными канатами для изменения угла переноса.
Предшествующий уровень техники
При работе драглайна, описанного в международной заявке PCT/AU00/01336, содержание которой приводится здесь посредством перекрестной ссылки, существует проблема, при попытке оператора выгрузить груз из ковша вблизи направляющего устройства экскаватора для тягового каната, заключающаяся в том, что ковш не может достигнуть своего заданного угла выгрузки из-за натяжения тягового каната. В особых случаях достигнутый угол может быть недостаточным для опорожнения ковша и это приводит к излишнему провисанию переднего подъемного каната, который может намотаться и/или повредиться. (Далее по тексту настоящего описания термин «передний подъемный канат» используется применительно к подъемному канату, прикрепленному к передней части ковша, то есть примыкающий к точке крепления тягового каната, а термин «задний подъемный канат» применяется по отношению к канату, прикрепленному к другому или заднему концу ковша). Кроме того, когда провисание устранено, излишняя пиковая нагрузка может передаваться на компоненты подъемной системы.
В драглайне с дифференциальным управлением подъемными канатами крайне желательно, чтобы относительное движения подъемных канатов и тягового каната координировалось компьютером, и, следовательно, также желательно управлять положением выгрузки ковша посредством компьютерного управления, чтобы гарантировано избежать выгрузки в крайне близком положении.
Однако было установлено, что геометрическое место точек для позиции крепления заднего подъемного каната, которая определяет допустимые границы наиболее точного приближения огибающей поверхности, на которой разгружается ковш, является сложной составной кривой, форма которой изменяется в зависимости от многих факторов, включая геометрию ковша, геометрию и угол стрелы, отделение от шкива стрелы, распределение нагрузки на канат и другие параметры. Как правило, это геометрическое место точек представляет собой кривую с двумя точками возврата из-за сложных механизмов вращения и перемещения, которые в процессе выгрузки могут находиться на различных уровнях - выше или ниже направляющих устройств драглайна. Попытка проанализировать и управлять этой сложной кривой во время работы драглайна с тем, чтобы обеспечить компьютерное управление пределами положения ковша или сигнализацию оператору драглайна, требует значительной вычислительной мощности и программирования сложных алгоритмов в компьютерной системе управления. Это нежелательно из-за увеличения расходов и необходимости производить расчеты в реальном времени во время работы драглайна.
Поэтому, желательно обеспечить альтернативный способ расчета для случая, когда ковш находится в положении, слишком близком для эффективного опорожнения ковша простым, но эффективным способом, который легко осуществить, используя существующие средства управления драглайном и оборудование.
Сущность изобретения
Соответственно, настоящее изобретение обеспечивает способ управления положением выгрузки драглайна, у которого наклон ковша регулируется дифференциальным управлением двумя подъемными канатами, прикрепленными к передней и задней поверхности ковша соответственно, при этом упомянутый способ включает в себя этапы: определения радиуса цилиндрической огибающей поверхности, имеющей ось, совпадающую с осью вращения корпуса драглайна вокруг опорного основания; расчета того, когда точка крепления заднего подъемного каната ковша достигает упомянутой огибающей поверхности; и создания сигнала для управления режимом выгрузки в этом положении.
Предпочтительно этап расчета того, когда точка крепления заднего подъемного каната к ковшу достигает огибающей поверхности, осуществляется компьютером в реальном времени при работе драглайна.
Предпочтительно компьютер является тем же компьютером, что использован для управления дифференциальным травлением переднего подъемного каната и заданного подъемного каната.
Предпочтительно радиус цилиндрической огибающей поверхности определяется для аппроксимации геометрического места положений точек крепления заднего подъемного каната к ковшу при заданном угле переноса ковша, тем самым определяя заданный угол выгрузки при отпускании переднего подъемного каната.
Предпочтительно заданный угол переноса ковша составляет приблизительно +20°.
Предпочтительно заданный угол выгрузки рассчитывается как угол, получаемый при полном опорожнении ковша для конкретной загрузки.
Предпочтительно заданный угол выгрузки составляет приблизительно -40° или менее.
Предпочтительно положение точки крепления заднего подъемного каната к ковшу рассчитывается с использованием параметров из упомянутого того же самого компьютера.
Предпочтительно упомянутые параметры включают в себя величины наклона заднего каната и травления заднего каната.
Краткое описание чертежей
Не ограничивая любые другие формы, которые могут попадать под его объем, один предпочтительный вариант осуществления настоящего изобретения будет теперь описан на примере со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - схематический вид сбоку драглайна, использующего дифференциальное управление подъемными канатами с положением ковша, готового к выгрузке вблизи направляющего устройства драглайна;
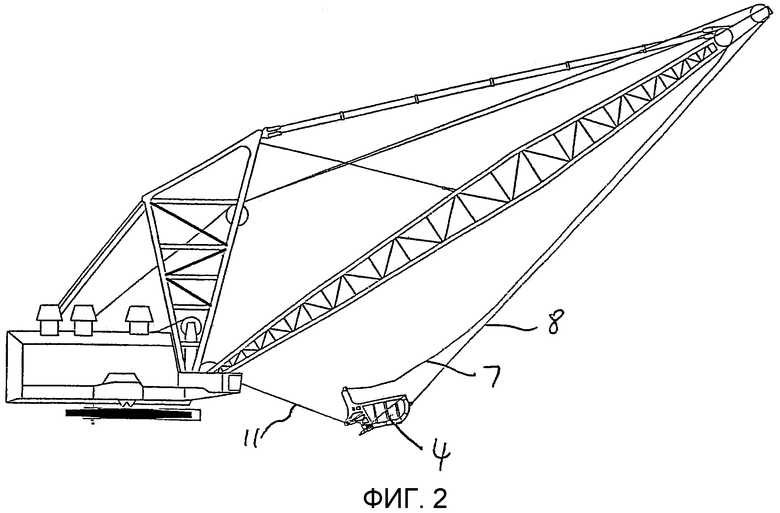
фиг.2 - вид, аналогичный фиг.1, показывающий попытку выгрузить ковш, не достигая заданного значения угла выгрузки;
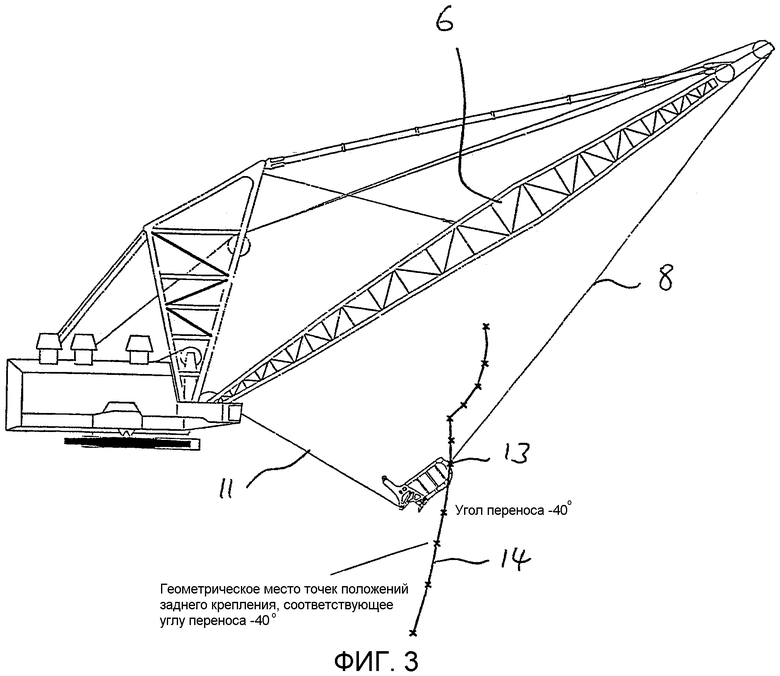
фиг.3 - вид, аналогичный фиг.1, показывающий геометрическое место положения заднего крепления, за пределами которого невозможно достичь угла выгрузки 40° или более;
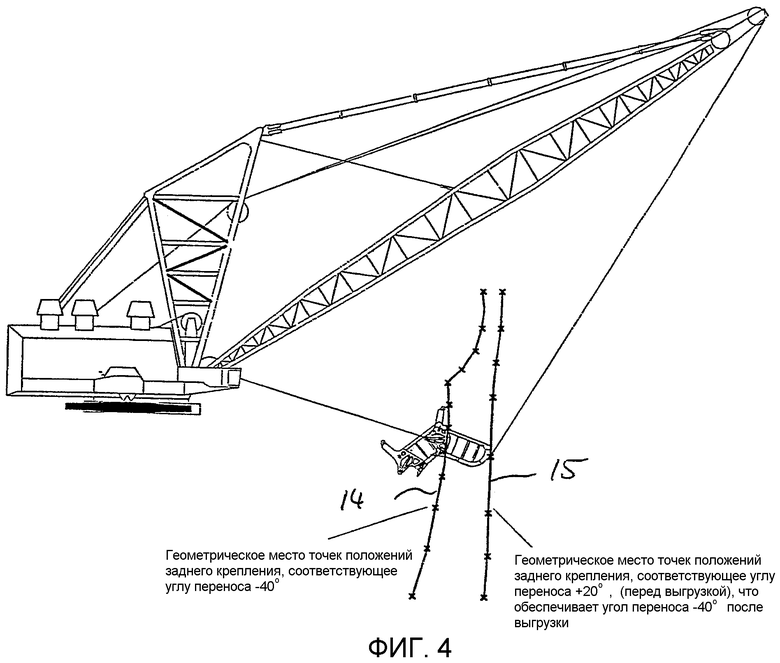
фиг.4 - вид, аналогичный фиг.3, показывающий геометрическое место соответствующих положений заднего крепления в режиме переноса груза ковшом;
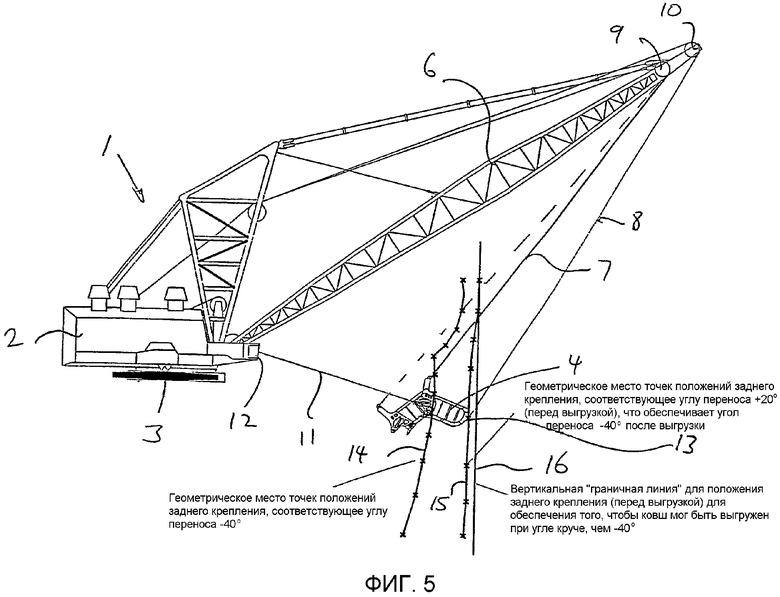
фиг.5 - вид, аналогичный фиг.4, показывающий наложение вертикальной или цилиндрической ограничивающей огибающей поверхности в соответствии с настоящим изобретением.
Подробное описание предпочтительных вариантов осуществления изобретения
Драглайн 1, обычно применяемый для крупномасштабных горнодобывающих работ, имеет корпус 2, установленный с возможностью вращения на основание 3 в виде платформы, которое обычно содержит направляющие, позволяющие драглайну двигаться в обратном направлении для достижения заданного положения для работы ковша 4.
В драглайнах, использующих дифференциальное управление подъемными канатами для изменения угла 5 переноса ковша 4, ковш поддерживается стрелой 6 посредством переднего подъемного каната 7 и заднего подъемного каната 8, наматывающимися на шкивы 9 и 10 соответственно. Ковш дополнительно управляется тяговым канатом 11.
Когда драглайн такого типа работает ковшом вблизи от направляющих устройств 12 тягового каната, как показано на фиг.1, и предпринята попытка выгрузить груз посредством стравливания или снятия натяжения переднего подъемного каната 7, то ковш может не достигнуть заданного угла выгрузки, обычно минус 70°, из-за натяжения тягового каната 11.
Как видно из фиг.2, это приводит к провисанию переднего подъемного каната 7, что, в свою очередь, может привести к наматыванию подъемного каната вокруг шкива 9 или к возможному соскакиванию с ограничительных канавок барабана лебедки, или к возможному наматыванию вокруг частей ковша, что может вызвать серьезные повреждения подъемного каната и связанных с ним частей. В дополнение при устранении провисания чрезмерная пиковая нагрузка передается компонентам подъемной системы, что приводит к последующему повреждению или сокращению срока службы компонентов.
Возможно рассчитать положение близости ковша относительно направляющих устройств тягового каната и стрелы 6, за пределами которого ковш повисает и не выгружается полностью из-за натяжения тягового каната 11. Представленное как геометрическое место положений задней точки 13 крепления (фиг.3) это геометрическое место точек может быть изображено как сложная кривая с двумя точками перегиба, как показано позицией 14 на фиг.3. Эта кривая основана на предположении, что минимальный угол выгрузки ковша составляет минус 40° (из-за угла трения между дном ковша и груза). Если задняя точка крепления ковша расположена ближе к направляющим устройствам, чем геометрическое место 14 точек, то достигаемый угол переноса при выгрузке является круче, чем минус 40°, и наоборот, для позиций более удаленных. Геометрическое место точек является сложной составной кривой, форма которой будет зависеть от многих факторов, включая геометрию ковша, геометрию и угол стрелы, точку отделения от шкива, распределение нагрузки по канату и т.д. Двойной перегиб кривой возникает из-за сложных механизмов вращения и перемещения, возникающих в процессе выгрузки на различных уровнях выше или ниже направляющих механизмов драглайнов.
На практике было установлено, что недостаточно вычислить форму геометрического места точек выгрузки, показанного на фиг.3, поскольку ковш работает в режиме переноса груза непосредственно перед выгрузкой, а следовательно, любая система управления допустимого положения выгрузки должна учитывать геометрию ковша непосредственно перед началом выгрузки. На фиг.4 позицией 15 обозначено геометрическое место точек, которое соответствует точке заднего крепления, когда ковш находится под углом переноса +20° непосредственно перед выгрузкой, что приведет в конечном положении заднего крепления к достижению геометрического места точек, обозначенного позицией 14. Как можно видеть, форма геометрического места 15 представляет собой приблизительно прямую вертикальную линию.
Форма геометрического места 14 точек и форма геометрического места 15 точек были получены в результате эмпирических измерений, а получить их с помощью математических алгоритмов чрезвычайно трудно, и даже если они могут быть отображены математически, то потребуют сложных и объемных компьютерных ресурсов как программного обеспечения, так и электронно-вычислительного оборудования для осуществления математических расчетов в реальном времени, необходимых для управления работой драглайна.
Таким образом, настоящее изобретение использует тот факт, что заднее положение крепления непосредственно перед выгрузкой представляет собой приблизительно прямую вертикальную линию (или, более практично, цилиндр, имеющий ось, совпадающую с осью вращения корпуса 2 драглайна вокруг его основания 3) для обеспечения практически используемого механизма управления в режиме реального времени работой драглайна.
Для ограничения выгрузки положениями вблизи геометрического места точек 15, показанного на фиг.4, достаточно аппроксимировать геометрическое место точек вертикальной прямой ограничительной линии 16 (фиг.5) или в 3-х мерном виде - цилиндрической огибающей поверхностью. Между этой линией или огибающей поверхностью и действительным геометрическим местом точек 15 имеется очень малая погрешность, что максимизирует максимум используемого диапазона выгрузки в горизонтальном направлении.
Следовательно, программирование параметров заданной огибающей поверхности 16 в управляющем компьютере для драглайна, используя такие параметры как величины наклона заднего каната (8) и травления, которые уже являются рабочими параметрами, имеющимися в компьютерном управлении. Эти параметры определяют геометрическое место точек положений заднего подъемного каната, подходящих для выгрузки, и, следовательно, могут просто и быстро задержать осуществление режима выгрузки, если эти параметры превышены, т.е. если задняя точка крепления ковша движется внутри огибающей поверхности 16.
Также возможно очень просто и легко обеспечить визуальную сигнализацию оператору, когда ковш достиг этого положения, например, путем визуальной индикации на панели управления перед оператором, так что оператор не будет предпринимать попыток перемещения ковша в положение, в котором невозможна эффективная выгрузка, экономя время и увеличивая функциональную эффективность драглайна.
Это особенно необходимо, поскольку из-за масштабов драглайна и расстояний ковша от корпуса драглайна, ракурс, под которым смотрят операторы, делает трудным определение расстояния по горизонтали ковша от оператора. Это усугубляется при управлении ковшом «ниже шасси», например, как показано на фиг.3, поскольку оператор «видит» длину тягового каната 11, которая стравлена, но она может быть значительно больше, чем горизонтальное пространство между ковшом и направляющим устройством для тягового каната, из-за наклона тягового каната в положении «ниже шасси».
Этот способ контроля положением разгрузки много проще для вычисления решения, чем сложное аналитическое решение или эмпирическая таблица «поиск», и сам по себе обеспечивает более быстрый и надежный способ управления границами выгрузки ковша драглайна. Он также позволяет максимизировать полезный диапазон выгрузки драглайна в горизонтальном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЛЬШОЙ ДРАГЛАЙН С ЭЛЕКТРОПРИВОДОМ | 2000 |
|
RU2290475C2 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |
| Рабочее оборудование драглайна | 1975 |
|
SU606945A1 |
| Подвеска ковша экскаватора-драглайна | 1991 |
|
SU1813143A3 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| УСТРОЙСТВО ДЛЯ ПРИНУДИТЕЛЬНОЙ РАЗГРУЗКИ КОВША ДРАГЛАЙНА | 1993 |
|
RU2099474C1 |
| КОВШ ЭКСКАВАТОРА-ДРАГЛАЙНА | 1995 |
|
RU2078875C1 |
| Рабочее оборудование экскаватора-драглайна | 1983 |
|
SU1177420A1 |
| Рабочее оборудование экскаватора-драглайна | 1981 |
|
SU972008A1 |
| Ковш экскаватора-драглайна | 1982 |
|
SU1060768A1 |
Изобретение относится к области строительства и горного дела, в частности к управлению положением выгрузки ковша драглайна. Техническая задача - упрощение способа контроля положением разгрузки, более быстрый и надежный способ управления границами выгрузки ковша и увеличения в производительности из-за уменьшенного времени производственного цикла и повышение безопасности работ. Способ управления положением выгрузки драглайна, у которого наклон ковша регулируют посредством дифференциального управления двумя подъемными канатами, прикрепленными соответственно спереди и сзади ковша. Способ включает в себя этапы определения радиуса цилиндрической огибающей поверхности с осью, совпадающей с осью вращения корпуса драглайна на несущем основании, а также расчета того, когда положение точки крепления заднего подъемного каната к ковшу достигнет упомянутой огибающей поверхности, и обеспечения в этом положении сигнала управления режимом выгрузки. Причем радиус цилиндрической огибающей поверхности определяют для аппроксимации геометрического места положений точек крепления заднего подъемного каната к ковшу при заданном угле переноса ковша, тем самым определяют заданный угол выгрузки при отпускании переднего подъемного каната. 7 з.п.ф-лы, 5 ил.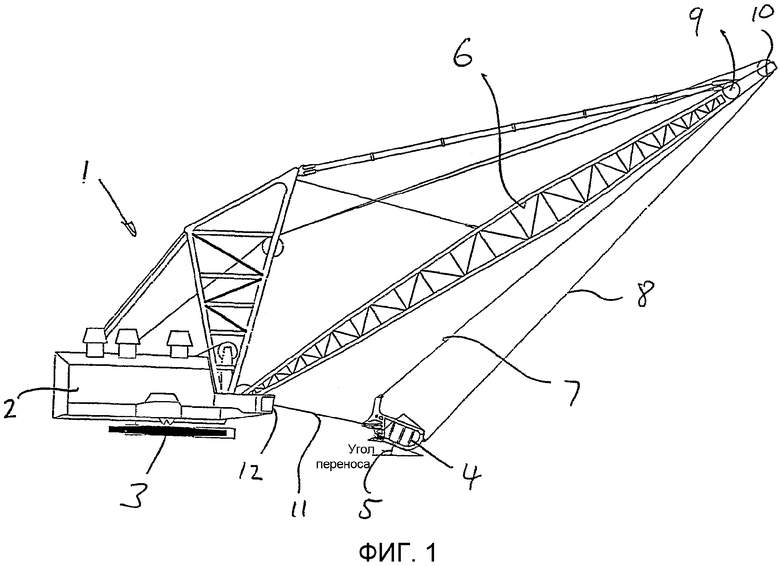
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Способ определения показателей работы экскаватора-драглайна | 1986 |
|
SU1411387A1 |

