Изобретение относится к машиностроению, в частности к подъемно-транспортирующим устройствам, и может быть использовано для навешивания длинномерных изделий на подвесной толкаюш,ий конвейер. Цель изобретения - повышение производительности и.надежности работы устройства. На фиг. 1 изовра-жено предлагаемое устройство, вид c6otty на фиг. 2 - то же, план. Устройство для перемеш.ения и загрузки включает механизм 1 подачи длинномерных изделий 2 и многоярусную подвеску 3, установленную на перемещаемой вертикальной подъемно-опускной секции 4 подвесного толкающего конвейера. Механизм 1 подачи выполнен в виде двух неподвижных штанг 5 и двух подвижных штанг 6, шарнирно связанных тремя взаимно параллельными кривошипами 7, один из которых связан с приводом 8. Штанги 5 и 6 содержат ячейки 9 для изделий 2. Каждая из ближайш,их к подвеске 3 ячеек 9 в неподвижных штангах 5 размещена соосно с ячейками в многоярусной подвеске 3, вне зоны действия подвижных штанг 6, ниже уровня других ячеек 9, соединена с предыдущей ячейкой 9 наклонным участком 10 неподвижной штанги 5, расположенным в зоне действия подвижной штанги 6, и снабжена датчиком 11 управления подачей изделий 2. Подвеска 3 на каждом ярусе содержит две ячейки 12 для приема изделий 2 и выполнена с возможностью взаимодействия в нижнем положении с датчиком 13 управления подачей первого изделия 2. Ячейка 9 выполнена на конце наклонного участка 10. Устройство работает следующим образом. Изделие 2 подается в ячейки 9 неподвижных штанг 5, включается привод 8, кривошипы 7 вращаются, подвижные щтанги 6 подхватывают изделие 2 и переносят его в следующие ячейки 9 в неподвижных штангах 5. Цикл работы повторяется до накопления на неподвижных штангах 5 комплекта изделий 2, равного количеству ярусов на подвеске 3, при этом ячейки 9 в неподвижных штангах, ближайшие к подвеске 3, остаются свободными. Привод выключается. Подвеска 3 опускается в нижнее положение и взаимодействует с датчиком 13, который дает команду на включение привода 8. Подвижные штанги 6 совершают один цикл, все изделия 2 перемещаются вперед к подвеске 3 на один шаг и привод 8 останавливается. При этом переднее изделие 2 подхватывается подвижными штангами 6 и опускается на наклонные участки 10 неподвижных штанг 5. Траектория ячеек 9 подвижных штанг 6 показана на фиг. 1. Под действием кинетической энергии подвижных штанг 6 и самого изделия 2, а также силы тяжести изделие 2 опускается в нижние ячейки 9 и взаимодействует с датчиком 11. Подвеска 3 поднимается, ячейки 12 верхнего яруса подхватывают изделие 2, датчик 11 дает команду на включение привода 8. Подвижные штанги 6 совершают один цикл, следующее изделие 2 опускается в нижние ячейки 9 и взаимодействует с датчиком 11. Далее цикл повторяется до тех пор, пока все ярусы подвески 3 не будут заполнены. При этом подвеска 3 поднимается непрерывно и несинхронно скорости механизма 1 подачи, а время перемещения изделия 2 между, соседними ячейками 9 должно быть меньше, чем время перемещения ячеек 12 соседних ярусов подвески 3 на шаг. После заполнения ячеек 12 подвески 3 подъемноопускная секция 4 поднимается и подвеска перемеща ется подвесным конвейером. , ;Для следуюпдей подвески 3 цикл работы повторяется. Формула изобретения Устройство для перемещения и загрузки длинномерных изделий, включающее подвесной толкающий конвейер с многоярусной подвеской, выполненной с ячейками, и механизм подачи длинномерных изделий в виде накопителя изделий с наклонным участком, выполненным на конце, с ячейкой, отличающееся тем, что, с целью повыщения производительности и надежности работы устройства, подвесной толкающий конвейер в зоне расположения механизма подачи длинномерных изделий снабжен подъемно-опускной секцией и датчиком управления подачи первого изделия, при этом ячейка наклонного участка снабжена датчиком управления подачей изделий и расположена соосно с ячейками многоярусной подвески.
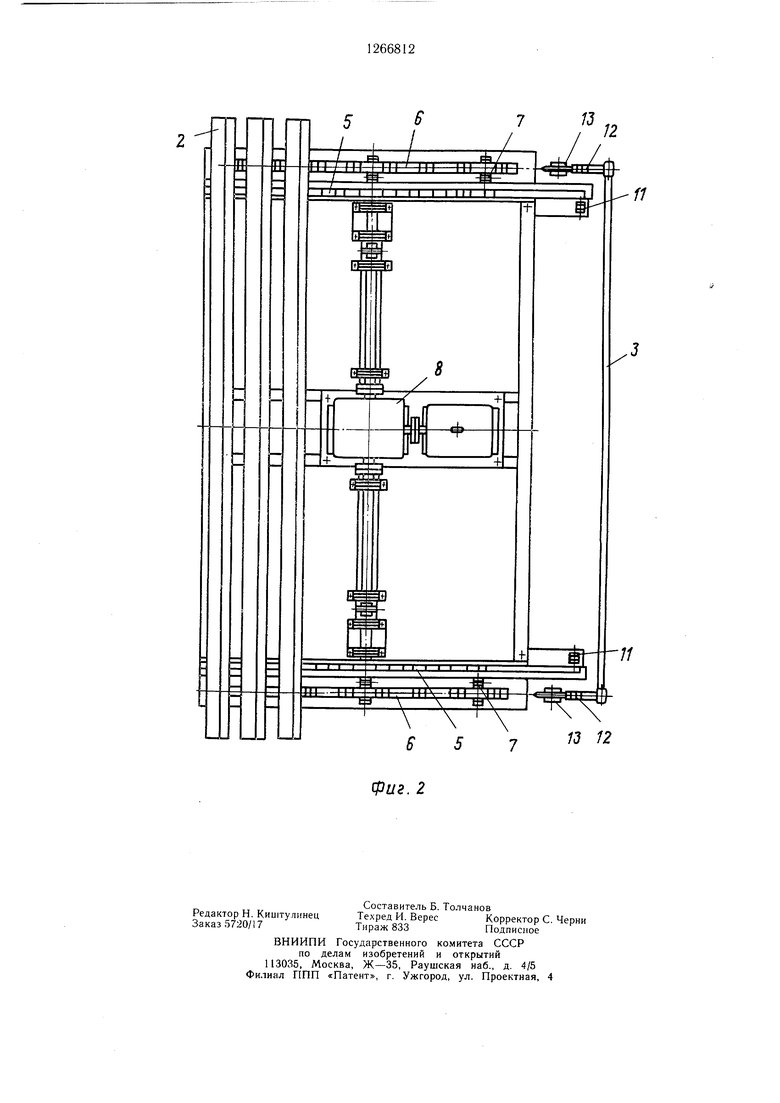
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения и загрузки цилиндрических изделий | 1986 |
|
SU1364574A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Поточная линия для окрашивания изделий | 1985 |
|
SU1328270A1 |
| Склад для хранения цилиндрических изделий | 1982 |
|
SU1036628A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Подъемно-опускная секция подвесного толкающего конвейера | 1981 |
|
SU1008101A1 |
| Устройство для навешивания и съема грузовых подвесок с тележки толкающего конвейера | 1977 |
|
SU740641A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1969 |
|
SU239856A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1969 |
|
SU239121A1 |
Изобретение относится к области подъемно-транспортного машиностроения и повышает производительность и надежность работы устройства. Для этого в зоне расположения механизма подачи 1 длинномерных изделий (И) толкающая многоярусная подвеска (П) 3 закреплена на подъемноопускной секции 4 подвесного толкаюш,его конвейера и имеет датчик 13 управления подачи первого И. В ячейке (Я) 9 наклонного участка 10 механизма подачи 1 расположен датчик 11 управления подачей И. Я 9 наклонного участка 10 расположена соосно с Я 12 П 3. И 2 подхватывается подвижными штангами 6 из Я 9 неподвижных штанг 5 и переносится в следующую Я щтанг 5. При накоплении в Я неподвижных штанг 5комплекта И 2, равного количеству ярусов П 3, в штангах 5 ближайшие с П 3 Я 9 свободны. П 3 опускается в нижнее положение и взаимодействует с датчиком 13, включающим привод 8. Подвижные штанги 6перемещают И 2 на один шаг вперед. Ближайшие к наклонному участку 10 И-2 опускаются на него, скатываются в Я и взаимодействуют с датчиком 11, подающим команду на подъем П 3. При подъеме П 3 Я 12 верхнего яруса подхватывают И 2. Датчик (О 11 подает команду на включение привода 8. сл Цикл повторяется до тех пор, пока не будут выполнены все ярусы П 3. После заполненя Я 12 подъемно-опускная секция 4 опускается и П 3 перемещается подвесным конвейером 2 ил. «-w ю 05 о 00 ю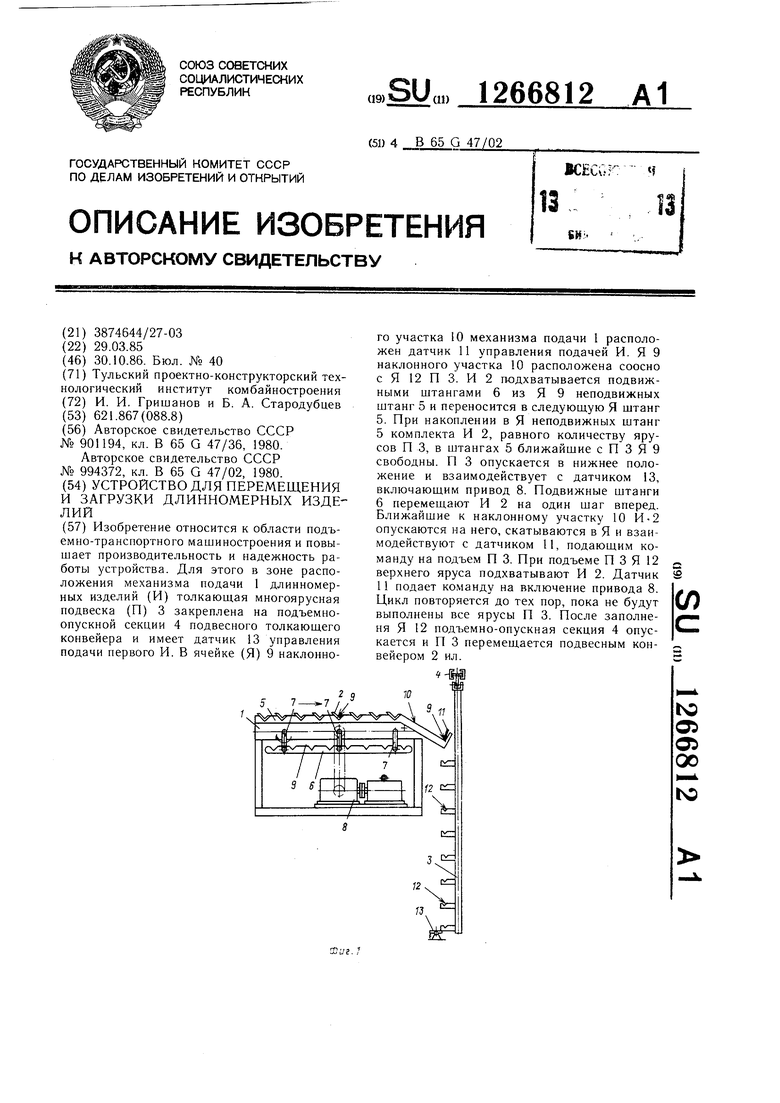
| Устройство для загрузки цилиндрических грузов на многополочные подвески | 1980 |
|
SU901194A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Механизм загрузки и разгрузки конвейера | 1980 |
|
SU994372A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
