перемещений транспортируемой конструкции стойка 3 выполнена в виде подъемника с опорной частью 11, которая соединена с шарниром 2, и плунжерной частью 12, соединенной с помощью шарнира 4 с диафрагмой 6. В состав устройства вхо. 1
Изобретение относится к подъемно-транспортным устройствам, предназначенным для перемещения крупногабаритных, главным образом, строительных конструкций, но может быть использовано при перевозке крупногабаритных конструкций различного назначения в любой отрасли народного хозяйства.
Цель изобретения - повышение производительности.
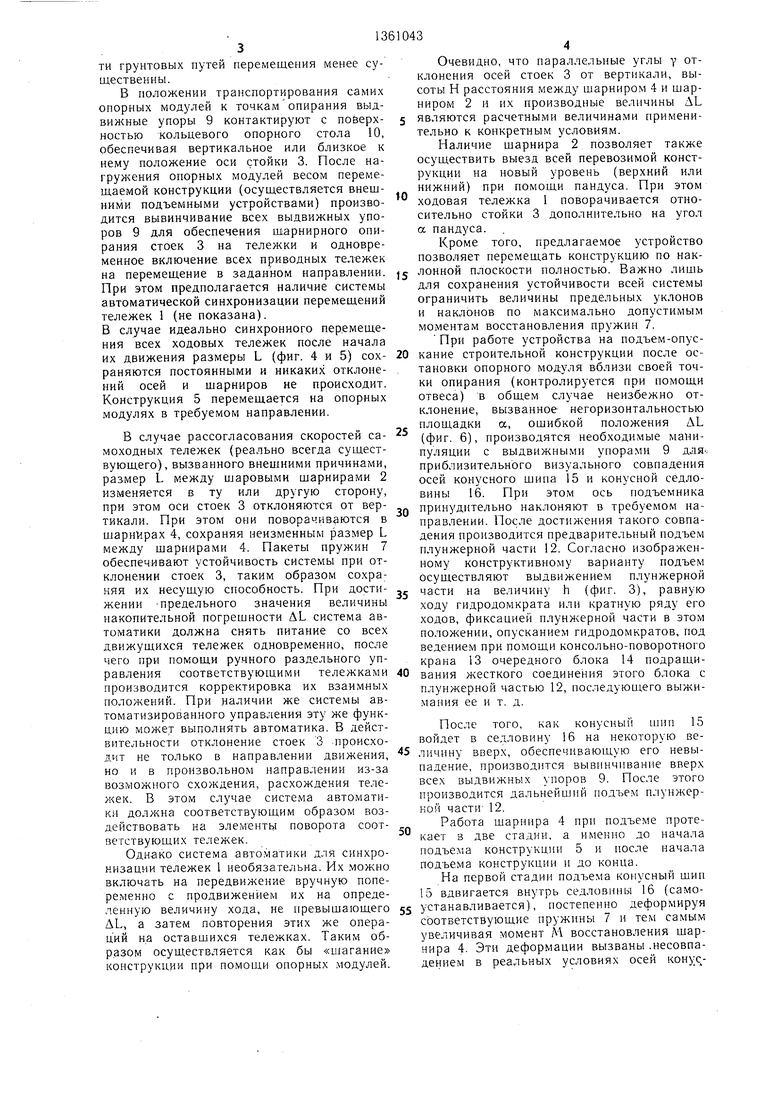
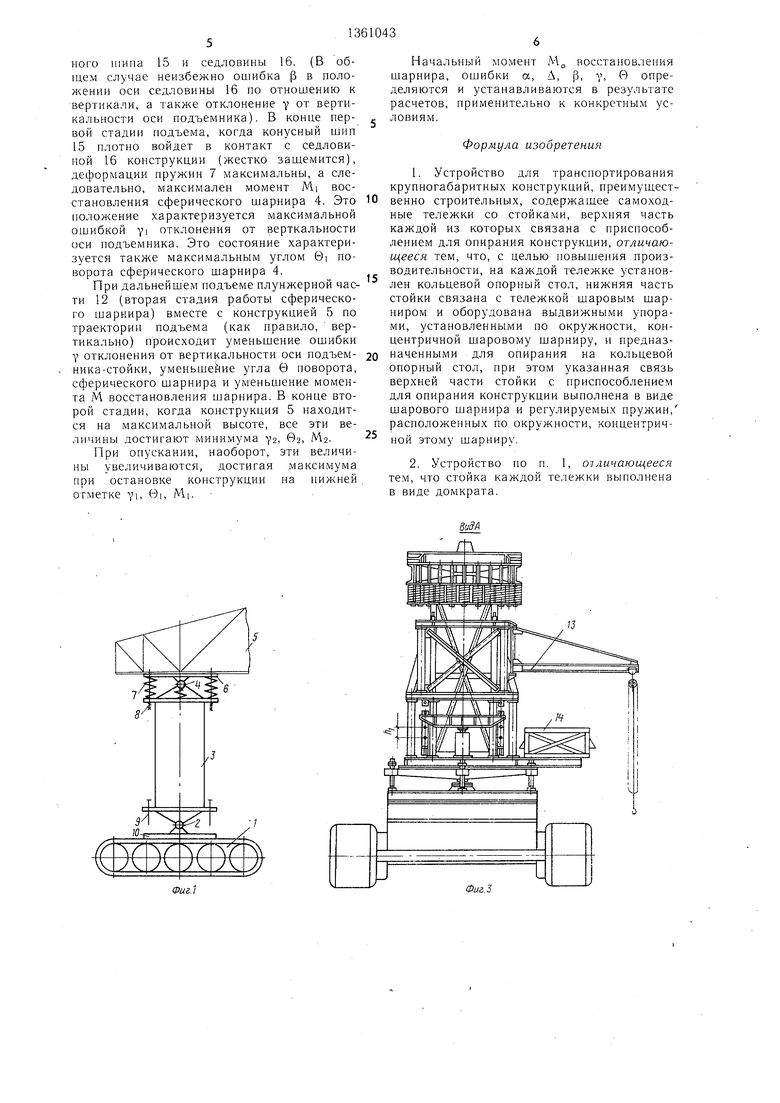
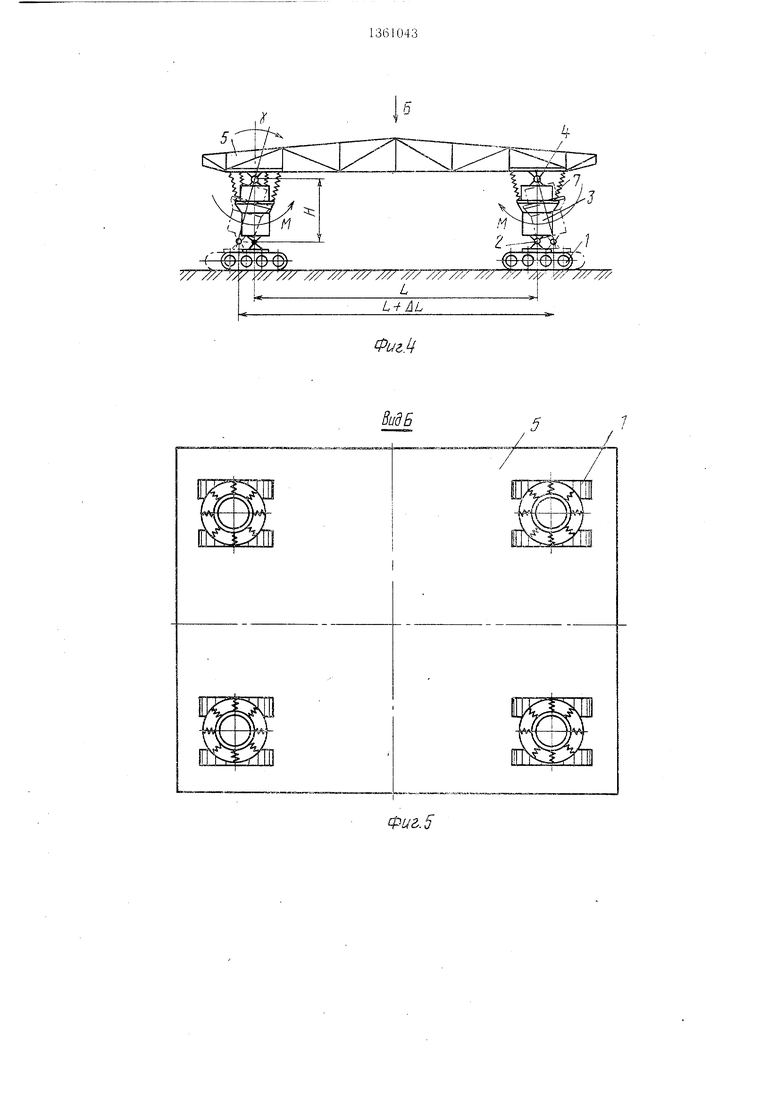
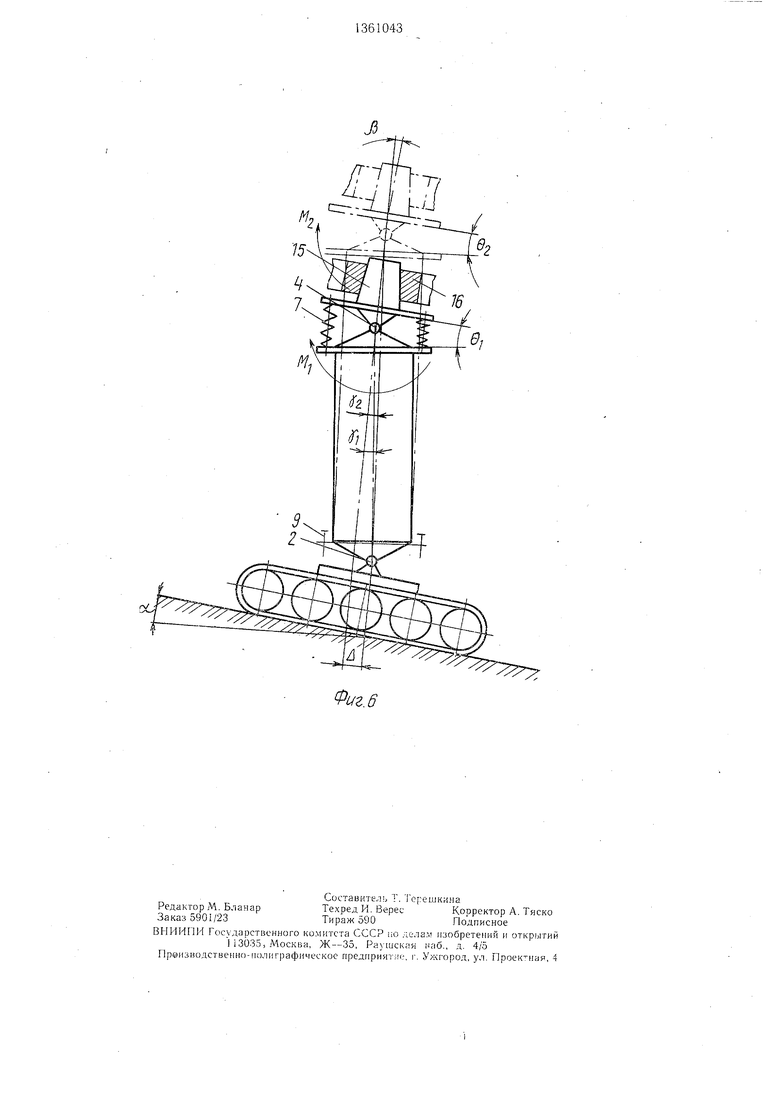
На фиг. 1 схематически изображена тележка устройства; на фиг. 2 - дележка, стойка которой выполнена в виде подъемника; на фиг. 3 - вид А па фиг. 2; на фиг. 4 - устройство при осуществлении горизонтального транспортирования конструкции поперечный разрез; на фиг. 5 - вид Б па фиг. 4; на фиг. 6 - упро- иденная схема работы тележки при вертикальном перемещении конструкции.
Устройство для трансиортирования конструкций состоит, из нескольких опорных модулей, каждый из которых содержит (фиг. 1) полноповоротную самоходную тележку 1 (двигатель и элементы управления не показаны), на которой ири помо- щп опорного шарового шарнира 2 установлена вертикальная стойка 3. Своим верхним концом при ПОМО1ЦИ inapOBoro luap- нира 4 стойка 3 соединена с приспособлением для опирания строительной конструкции 5 диас)рагмой 6. При помоиги пружин 7, снабженных регулируемыми тягами 8, стойка 3 подпружинена относительно диафрагмы 6. В нижней части стойка 3 оборудована выдвижными упорами 9, расположенными по окружности, концентричной опорному шаровому шарниру 2 с возможностью опирания на кольцевой опорный стол 10, жестко установленный па тележке 1.
При таком выполнении устройство может быть использовано для транспортирования конструкции в горизонтально.м направлении.
В случая.х, когда от устройства требуется совмещение функций транспортирования и подъема.- опускания строительной конструкции, стойка выполнена в виде подъемника (фиг. 2 и 3) и содержит опорную 11 и плунжерную 12 части.
дят также консольно-поворотный кран и блоки подращивания. При транспортировании жесткой (недеформируемой) конструкции, во избежание зависания тележек 1 из-за неровностей грунта, целесообразно ее опирать на три опорных модуля. 1 з.п. ф-лы, 6 ил.
0
5
0
5
0
5
0
5
Опорная часть 11 соединена с шаров1 1м шарниром 2, а плунжерная часть 12 при помощи шарового шарнира 4 соединена с упомянутой диафрагмой 6. Устройство содержит также консольно-поворотный кран 13 и необходимое количество блоков 14 подращивания. На фиг. 2 изображен также возможный конструктивный вариант выполнения приспособления для опирания перемещаемой конструкции. На диафрагме 6 жестко установлен конусный ( шип 15, а перемещаемая конструкция 5 в этом случае имеет соответствуюн1ую конусную седловину 16.
Наличие конусного шипа 15 на опорном моду.че и соответствующей конусной седловине 16 на подни.маемой конструкции 5 обеспечивает, помимо са.моустанавливае- мости, надежную фиксацию опо1)ного модуля с поднимаемой конструкцией без дополнительных ручных операций. В некоторых случаях при известных и допустимых горизонтальных нагрузках приспособление для онирания перемещаемой конструкции может и не иметь щипа. В этом случае контакт между опорным модулем и пе|)емещае- мой конструкцией осупд.ествляется по плоскости и ж.есткое заще.мление обеспечивается совместным действием сил, веса и трения. Опорный модуль с таким приспособлением применим для перемещения различных конструкций, не |риспособ;1енных специально для него.
Горизонтальное перемещение (транспортировку) строительной конструкции, предварительно собранной на специальном стапеле (не показан), осуществляют после установки ее на опорные модули устройства. В случае трансиортирования жесткой (недеформируемой) конструкции целесообразно опирание на три модуля, так как при транспортировании конструкции при по.монхи четырех и более модулей выдвигаются по- выП) енные требования к плоскостности и параллельности грунтовых путей перемеп1е- ния (возможны случаи зависания некоторых тележек). В случае гибкой (допускающей деформации в вертикальном направлении) транспортируемой конструкции требования к плоскостности и параллельноети грунтовых путей перемещения менее существенны.
В положении транспортирования самих опорных модулей к точкам опирания выдвижные упоры 9 контактируют с поверхностью кольцевого опорного стола 10, обеспечивая вертикальное или близкое к нему положение оси стойки 3. После на- гружения опорных модулей весом перемещаемой конструкции (осуществляется внещ- ними подъемными устройствами) производится вывинчивание всех выдвижных упоров 9 для обеспечения шарнирного опирания стоек 3 на тележки и одновременное включение всех приводных тележек
to
Очевидно, что параллельные углы у отклонения осей стоек 3 от вертикали, высоты Н расстояния между шарниром 4 и шарниром 2 и их производные величины ДЬ являются расчетными величинами применительно к конкретным условиям.
Наличие шарнира 2 позволяет также осуществить выезд всей перевозимой конструкции на новый уровень (верхний или нижний) при помощи пандуса. При этом ходовая тележка 1 поворачивается относительно стойки 3 дoпOv нитeльнo на угол а пандуса.
Кроме того, предлагаемое устройство позволяет перемещать конструкцию по накна перемещение в заданном направлении. 5 лонной плоскости полностью. Важно лишь
При этом предполагается наличие системы автоматической синхронизации перемещений тележек 1 (не показана). В случае идеально синхронного пер.емеще- ния всех ходовых тележек после начала
для сохранения устойчивости всей системы ограничить величины предельных уклонов и наклонов по максимально допустимым мо.ментам восстановления пружин 7.
При работе устройства на подъем-опусих движения размеры L (фиг. 4 и 5) сох- 20 кание строительной конструкции после ос- раняются постоянными и никаких отклоне- тановки опорного модуля вблизи своей точ- ний осей и
осей и шарниров не происходит. Конструкция 5 перемещается на опорных модулях в требуемом направлении.
В случае рассогласования скоростей самоходных тележек (реально всегда существующего), вызванного внешними причинами, размер L между шаровыми щариирами 2 изменяется в ту или другую сторону.
25
ки опирания (контролируется при помощи отвеса) в общем случае неизбежно отклонение, вызванное негоризонтальностью площадки а, ошибкой положения AL (фиг. 6), производятся необходимые манипуляции с выдвижными упорами 9 дл.я приблизительного визуального совпадения осей конусного щи па 15 и конусной седловины 16. При этом ось подъемника
при этом оси стоек 3 отклоняются от вер- принудительно наклоняют в требуемом наттлт а тл О rsu атгчш П(- пг г О1шоа LTSTJ- CI гэ
тикали. При этом они поворачиваются в шарнирах 4, сохраняя неизменным размер L между шарнирами 4. Пакеты пружин 7 обеспечивают устойчивость системы при отклонении стоек 3, таким образом сохра; няя их несущую способность. При достижении -предельного значения величины накопительной погрешности AL система автоматики должна снять питание со всех движущихся тележек одновременно, после чего при помощи ручного раздельного уп35
правлении. После достижения такого совпадения производится предварительный подъем плунжерной части 12. Согласно изображенному конструктивному варианту подъем осуществляют выдвижением плунжерной части на величину h (фиг. 3), равную ходу гидродомкрата или кратную ряду его ходов, фиксацией плунжерной части в этом положении,опусканием гидродомкратов, под ведением при помощи консольно-поворотного крана 13 очередного блока 14 подращиправлении. После достижения такого совпадения производится предварительный подъем плунжерной части 12. Согласно изображенному конструктивному варианту подъем осуществляют выдвижением плунжерной части на величину h (фиг. 3), равную ходу гидродомкрата или кратную ряду его ходов, фиксацией плунжерной части в этом положении,опусканием гидродомкратов, под ведением при помощи консольно-поворотного крана 13 очередного блока 14 подращиравления соответствующими тележками 40 вания жесткого соединения этого блока с производится корректировка их взаимных плунжерной частью 12, последующего выжи- положений. При наличии же системы ав- мания ее и т. д. томатизированного управления эту же функцию может выполнять автоматика. В деист-После того, как конусный 1.иип 15 вительности отклонение стоек 3 происхо- войдет в седловину 16 на некоторую ве- дит не только в направлении движения, личину вверх, обеспечивающую его невы- но и в произвольном направлении из-за падение, производится вывинчивание вверх возможного схождення, расхождения тележек. В этом случае система автоматики должна соответствующим образом воздействовать на элементы поворота соответствующих тележек.
Однако система автоматики для синхронизации тележек 1 необязательна. Их можно включать на передвижение вручную попеременно с продвижением их на определенную величину хода, не превышающего 55 устанавливается), постепенно деформируя ЛЬ, а затем повторения этих же опера- соответствующие пружины 7 и тем самым ций на оставшихся тележках. Таким об- увеличивая момент М восстановления щар- разом осуществляется как бы «шагание нира 4. Эти деформации вызваны .несовпа- конструкции при помоп1и опорных модулей. дением в реальных условиях осей конут50
всех выдвижных упоров 9. После этого производится дальнейший подъем плунжерной части 12.
Работа шарнира 4 при подъеме протекает в две стадии, а именно до начала подъема конструкции 5 и после начала подъема конструкции и до конца.
На первой стадии подъема конусный шип 15 вдвигается внутрь седловины 16 (самоo
Очевидно, что параллельные углы у отклонения осей стоек 3 от вертикали, высоты Н расстояния между шарниром 4 и шарниром 2 и их производные величины ДЬ являются расчетными величинами применительно к конкретным условиям.
Наличие шарнира 2 позволяет также осуществить выезд всей перевозимой конструкции на новый уровень (верхний или нижний) при помощи пандуса. При этом ходовая тележка 1 поворачивается относительно стойки 3 дoпOv нитeльнo на угол а пандуса.
Кроме того, предлагаемое устройство позволяет перемещать конструкцию по нак5 лонной плоскости полностью. Важно лишь
для сохранения устойчивости всей системы ограничить величины предельных уклонов и наклонов по максимально допустимым мо.ментам восстановления пружин 7.
При работе устройства на подъем-опускание строительной конструкции после ос- тановки опорного модуля вблизи своей точ-
ки опирания (контролируется при помощи отвеса) в общем случае неизбежно отклонение, вызванное негоризонтальностью площадки а, ошибкой положения AL (фиг. 6), производятся необходимые манипуляции с выдвижными упорами 9 дл.я- приблизительного визуального совпадения осей конусного щи па 15 и конусной седловины 16. При этом ось подъемника
принудительно наклоняют в требуемом напринудительно наклоняют в требуемом
правлении. После достижения такого совпадения производится предварительный подъем плунжерной части 12. Согласно изображенному конструктивному варианту подъем осуществляют выдвижением плунжерной части на величину h (фиг. 3), равную ходу гидродомкрата или кратную ряду его ходов, фиксацией плунжерной части в этом положении,опусканием гидродомкратов, под ведением при помощи консольно-поворотного крана 13 очередного блока 14 подращивания жесткого соединения этого блока с плунжерной частью 12, последующего выжи- мания ее и т. д. После того, как конусный 1.иип 15 войдет в седловину 16 на некоторую ве- личину вверх, обеспечивающую его невы- падение, производится вывинчивание вверх
вания жесткого соединения этого блока с плунжерной частью 12, последующего выжи- мания ее и т. д. После того, как конусный 1.иип 15 войдет в седловину 16 на некоторую ве- личину вверх, обеспечивающую его невы- падение, производится вывинчивание вверх
устанавливается), постепенно деформируя соответствующие пружины 7 и тем самым увеличивая момент М восстановления щар- нира 4. Эти деформации вызваны .несовпа- дением в реальных условиях осей конут
всех выдвижных упоров 9. После этого производится дальнейший подъем плунжерной части 12.
Работа шарнира 4 при подъеме протекает в две стадии, а именно до начала подъема конструкции 5 и после начала подъема конструкции и до конца.
На первой стадии подъема конусный шип 15 вдвигается внутрь седловины 16 (самоного типа 15 и седловины 16. (В общем случае неизбежно ошибка (3 в положении оси седловины 16 по отношению к вертикали, а также отклонение у от вертикальности оси подъемника). В конце первой стадии подъема, когда конусный шип 15 плотно войдет в контакт с седловиной 16 конструкции (жестко заш,емится), деформации пружин 7 максимальны, а следовательно, максимален момент восНачальный момент М,, восстановления шарнира, ошибки а, А, р, у, В определяются и устанавливаются в результате расчетов, применительно к конкретным условиям.
Формула изобретения
1. Устройство для транспортирования крупногабаритных конструкций, преимущестстановления сферического шарнира 4. Это Ю венно строительных, содержащее самоход- положение характеризуется максимальнойные тележки со стойками, верхняя часть ошибкой Yi отклонения от верткальности оси подъемника. Это состояние характеризуется также максимальным углом 0i поворота сферического шарнира 4.
При дальнейшем подъеме плунжерной части 12 (вторая стадия работы сферического шарнира) вместе с конструкцией 5 по траектории подъема (как правило, вертикально) происходит уменьшение ошибки Y отклонения от вертикальности оси подъем- 20 наченными для опирания на кольцевой ника-стойки, уменьшение угла 0 поворота, опорный стол, при этом указанная связь сферического шарнира и уменьшение момента М восстановления шарнира. В конце второй стадии, когда конструкция 5 находится на максимальной высоте, все эти величины достигают минимума 72, 02, М2.
При опускании, наоборот, эти величины увеличиваются, достигая максимума
25
каждой из которых связана с приспособлением для опирания конструкции, отличающееся тем, что, с целью повышения производительности, на каждой тележке установлен кольцевой опорный стол, нижняя часть стойки связана с тележкой шаровым шарниром и оборудована выдвижными упорами, установленными по окружности, концентричной шаровому шарниру, и предназверхней части стойки с приспособлением для опирания конструкции выполнена в виде шарового шарнира и регулируемых пружин, расположенных по окружности, концентричной это.му шарниру.
при остановке конструкции отметке у, 0i, MI.
2. Устройство по п. 1, отличающееся
на нижней тем, что стойка каждой тележки выполнена в виде домкрата.
Начальный момент М,, восстановления шарнира, ошибки а, А, р, у, В определяются и устанавливаются в результате расчетов, применительно к конкретным условиям.
Формула изобретения
венно строительных, содержащее самоход- ные тележки со стойками, верхняя часть
наченными для опирания на кольцевой опорный стол, при этом указанная связь
каждой из которых связана с приспособлением для опирания конструкции, отличающееся тем, что, с целью повышения производительности, на каждой тележке установлен кольцевой опорный стол, нижняя часть стойки связана с тележкой шаровым шарниром и оборудована выдвижными упорами, установленными по окружности, концентричной шаровому шарниру, и предназначенными для опирания на кольцевой опорный стол, при этом указанная связь
верхней части стойки с приспособлением для опирания конструкции выполнена в виде шарового шарнира и регулируемых пружин, расположенных по окружности, концентричной это.му шарниру.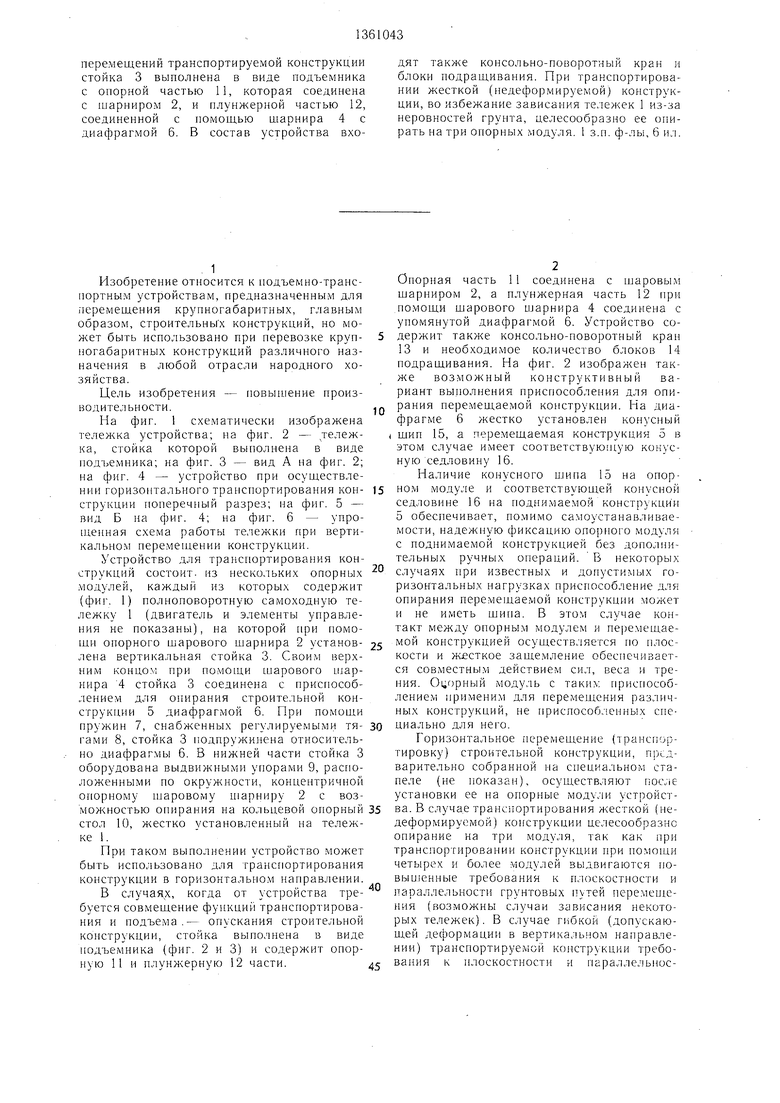
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый подъемник | 1982 |
|
SU1039867A2 |
| Шаговый подъемник | 1981 |
|
SU994395A1 |
| Шаговый подъемник | 1979 |
|
SU897709A1 |
| Шаговый подъемник | 1990 |
|
SU1740313A1 |
| Транспортное средство для перевозки строительных конструкций | 1986 |
|
SU1495165A1 |
| Транспортное средство для пере-ВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU850436A1 |
| Шаговый подъемник | 1988 |
|
SU1636329A1 |
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Транспортное средство для перевозкиКРупНОгАбАРиТНыХ ТяжЕлОВЕСНыХ гРузОВ | 1979 |
|
SU839777A1 |
| Шаговый подъемник | 1983 |
|
SU1222626A1 |
Изобретение может быть использовано для транспортирования, а также вертикального перемещения крупногабаритных строительных конструкций. Цель 1-;зоб- ретения - повышение производительности. Устройство содержит опорные модули, дый из которых включает самоходную тележку 1, на которой на шаровом шарнире 2 установлена стойка 3. Последняя своим верхним концом соединена с диафрагмой 6 посредством игрового шарнира 4 и пружин 7. Выдвижные упоры 9 служат для опирания на кольцевой опорный стол 10. Для -возможности вертикальных (Л оо СлЭ
Фиг.
Фиг.З
ФигМ
Фиг.5
| Устройство для перемещения грузов | 1979 |
|
SU931708A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для перевозки крупногабаритных тяжеловесных грузов | 1980 |
|
SU931524A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
