Изобретение относится к промышленному транспорту, а именно к промежуточному приводу конвейера.
Известен привод тягового органа конвейера, содержащий приводную и натяжную звездочки, толкатели в виде отгибаемых гусеницей изогнутых двухплеч- ных рычагов, связанные с гусеницей и имеющие ведущие и ведомые плечи с возможностью взаимодействия с тяговым органом конвейера, причем последние снабжены коромыслами и дополнительными двуплечными рычагами. Недостатком привода является его сложность, а также низкая надежность в связи с отсутствием
синхронизации в работе соседних двупле- чих рычагов, особенно при различном растяжении несущего полотна конвейера между соседними тяговыми узлами, что ведет к их неравномерной нагрузке и повышенному износу.
Известен привод конвейера, принятый за прототип, содержащий двигатель, ведомую и ведущие звездочки, огибаемую их цепь с тяговыми постоянными магнитами, а также нейтрализующие и дополнительные магниты установленные сополярно тяговым, Недостатком привода является сложность конструкции и ограниченный тяговый момент в связи с применением постоянных
3
ю
fe
;со
магнитов, а также недостаточная надежность в связи с неизбежным налипанием ферромагнитных частиц на полюса постоянных магнитов и нейтрализацией их тяговых усилий, большая металлоемкость в связи с непрерывным ферромагнитным покрытием несущего полотна конвейера.
. Цель изобретения - повышение надежности работы.
Указанная цель достигается тем, что промежуточный привод конвейера, содержащий ведущую и ведомую звездочки, охватывающую их тяговую цепь с тяговыми магнитами и ферромагнитные выступы гру- зонесущего полотна конвейера размещенные с возможностью взаимодействия с тяговыми магнитами, снабжен системой синхронизации и эллипсообразным несущим троллеем с ограниченной зоной проводимости, расположенным в плоскости, параллельной плоскости размещения тяговой цепи, при этом каждый тяговый магнит выполнен в виде электромагнита с катушкой, соединенной одним концом с тяговой цепью, а другим посредством индивидуального токосъемника с эллипсообразным несущим троллеем, а система синхронизации выполнена в виде трехвходовой схемы И, реле времени, схемы ИЛИ-НЕ, схемы управления блоком питания тяговых электромагнитов и двух бесконтактных конечных выключателей, установленных неподвижно относительно звездочек с возможностью получения, сигнала от ферромагнитных выступов и тяговых электромагнитов, при этом два входа трехвходовой схемы И соединены с бесконтактными конечными выключателями, а третий с выходом схемы ИЛ1/1-НЕ, выход схемы И соединен с входом реле времени, выход которого соединен с входом схемы ИЛИ-НЕ и входом схемы управления блоком питания тяговых электромагнитов.
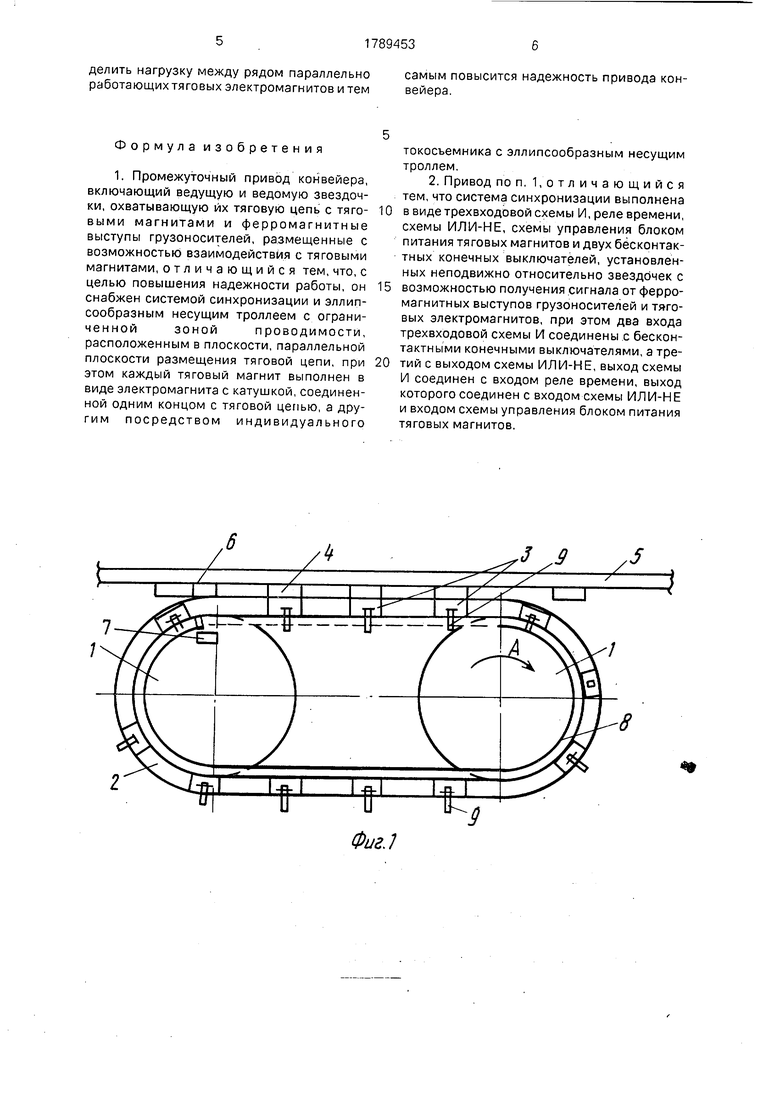
На фиг. 1 представлена кинематическая схема привода конвейера; на фиг. 2 - схема синхронизации.
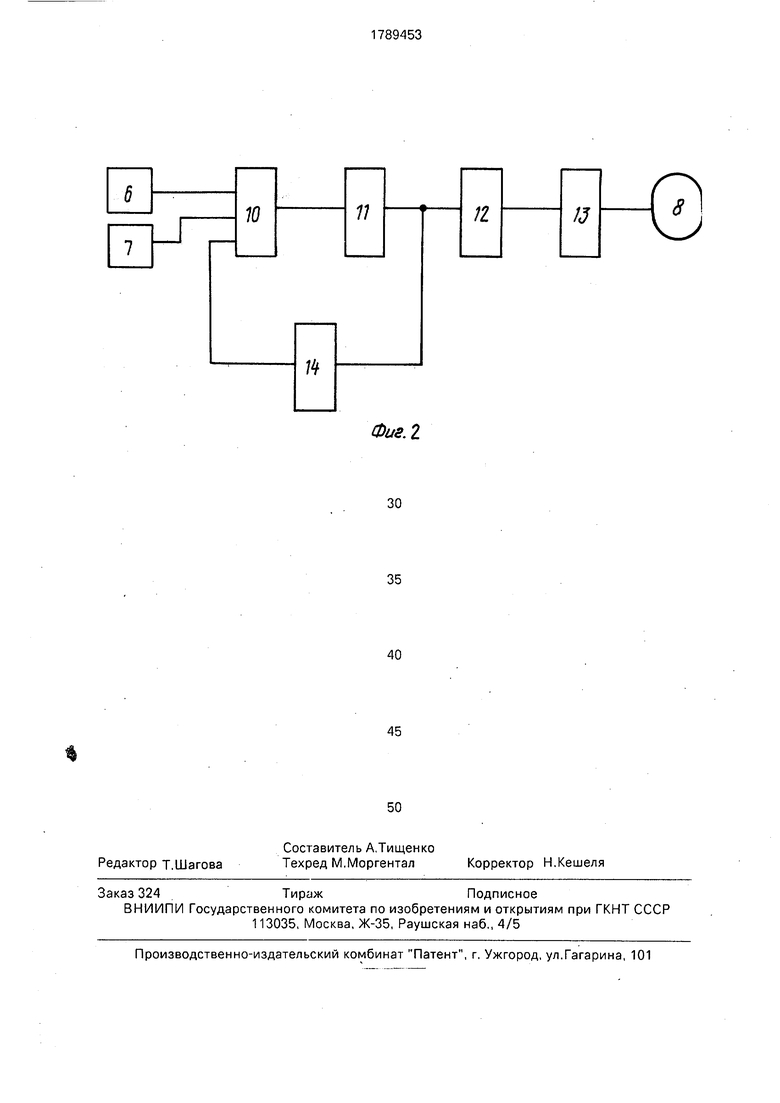
Привод конвейера содержит концевые звездочки 1 и обхватывающую их тяговую цепь 2, на которой с определенным шагом закреплены тяговые-электромагниты 3, которые могут взаимодействовать с ферромаг- нитными выступами 4 грузонесущего полотна 5 конвейера. Ширина ферромагнитных выступов 4 превышает ширину тяго- вых электромагнитов 3 на величину возможной вытяжки грузонесущего полотна 5 конвейера. На одинаковом расстоянии от звездочек 1 неподвижно расположены бесконтактные конечные выключатели 6 и 7, взаимодействующие с передними кромками ферромагнитных выступов 4 и тяговых электромагнитов 3. Параллельно плоскости движения тяговой цепи 2 расположен эл- липсообразный троллей 8, который с помощью токосъемников 9 шарнирно закрепленных на торцах тяговых электромагнитов 3 может подключаться к первым концам катушек тяговых электромагнитов 3, вторые концы которых подключены к тяго0 вой цепи 2, или земле. Троллей 8, имеет ограниченную зону проводимости на фиг. 1, показанную пунктиром. Выходы конечных выключателей 6 и 7 (см. фиг. 2) подключены к входам 3-х входовой схемы И-10, выход
5 который подключен через реле времени 11 к схеме управления 12, блока питания 13, тяговых электромагнитов 3, который подключен к троллею 8. Выход реле времени 11 подключен через схему ИЛИ-НЕ 14наЗ вход
0 схемы 10. Привод работает следующим образом. При подключении привода вращения звездочек 1 (на фиг. 1 не показанном), тяговая цепь 2 начинает перемещаться в направлении стрелки А. Как только совпадут
5 передние кромки тяговых электромагнитов 3 и ферромагнитных выступов 4, сработают конечные выключатели 6 и 7 и на выходе схемы И 10 появляется сигнал 1 поскольку на 3-ем входе схемы 10 уже дежурит сигнал
0 1 от схемы ИЛИ-НЕ 14 при отсутствии входного сигнала 1 на ее входе. Реле времени 11 срабатывает и через схему управления 12 включает блок питания 13, в результате чего подается питание на все
5 тяговые электромагниты 3, находящиеся в зоне проводимости троллея 8, поскольку все токосъемники 9, находящиеся на верхнем горизонтальном участке тяговой цепи 2, под действием собственного веса опущены на
0 троллей 8. Тяговая цепь 2 сцепляется таким образом с помощью тяговых электромагнитов 3 и ферромагнитных выступов 4 с грузо- несущим полотном 5 конвейера обеспечивая его работу. Поскольку, при
5 включении реле времени 11 работающем с выдержкой времени на отпускание, через схему 14 снимается сигнал 1 с 3 входа схемы И 10, на его выходе исчезает сигнал 1 конечные выключатели 6,7 уже не оказ.ы0 вают влияния на работу схемы питания троллея 8 до момента отпускания реле времени 11 уставка которого может быть выбра- на порядка нескольких часов, для периодической синхронизации положения
5 тяговых электромагнитов 3 и ферромагнитных выступов 4 для обеспечения их максимального сцепления и равномерного распределения тяговой нагрузки на все тяговые электромагниты 3. Предложенная конструкция позволяет равномерно распределить нагрузку между рядом параллельно работающих тяговых электромагнитов и тем
самым повысится надежность привода конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для распределения грузов по местам назначения | 1982 |
|
SU1131791A1 |
| Устройство для управления грузоносителем | 1990 |
|
SU1787899A1 |
| ПРИВОД КОНВЕЙЕРА | 2014 |
|
RU2559436C1 |
| Привод конвейера | 1982 |
|
SU1051001A1 |
| Устройство для управления грузоносителем | 1982 |
|
SU1036634A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1991 |
|
RU2006435C1 |
| Устройство для управления грузоносителем | 1980 |
|
SU912611A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ НАКОПЛЕНИЯ ТРАНСПОРТИРОВКИ ЗАКРЕПЛЕННОГО НА ТРОЛЛЕЯХ ШТУЧНОГО ГРУЗА | 1969 |
|
SU241990A1 |
| Устройство для адресования грузо-НОСиТЕля | 1979 |
|
SU812676A1 |
| Устройство для адресования монорельсовой тележки | 1978 |
|
SU749763A1 |
Сущность изобретения: промежуточный привод конвейера имеет ведущую и ведомую звездочки, обхватывающую их тяговую цепь с тяговыми магнитами и ферромагнитные выступы грузоносителей, размещенные с возможностью взаимодействия с тяговыми магнитами. Повышение надежности работы обеспечивается тем, что он снабжен системой синхронизации и эллипсообраз- ным несущим троллеем с ограниченной зоной проводимости, расположенным в плоскости, параллельной плоскости размещения тяговой цепи, при этом каждый тяговый магнит выполнен в виде электромагнита с катушкой, соединенной одним концом с тяговой цепью, а другим посредством индивидуального токосъемника - с эллипсообразным несущим троллеем. Система синхронизации выполнена в виде трехвходовой схемы И, реле времени, схемы ИЛИ-НЕ, схемы управления блоком питания тяговых магнитов и двух бесконтактных конечных выключателей, установленных неподвижно относительно звездочек с возможностью получения сигнала от ферромагнитных выступов грузоносителей и тяговых электромагнитов, при этом два входа трехвходовой схемы И соединены с бесконтактными конечными выключателями, а третий - с выходом схемы ИЛИ-НЕ, выход схемы И соединен с входом реле времени, выход которого соединен с входом схемы ИЛИ-НЕ и входом схемы управления блоком питания тяговых магнитов. 1 з.п. ф- лы, 2 ил. ел С
Формула изобретения
токосъемника с эллипсообразным несущим троллем.
Фиг.1
Фиг. 2
| Гусеничный привод тягового органа конвейера | 1985 |
|
SU1283181A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Привод конвейера | 1979 |
|
SU839926A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
